

High-precision assembling system and assembling method
An assembly system, high-precision technology, applied in measuring devices, optical devices, program-controlled manipulators, etc., can solve the problems of low assembly accuracy, weak rigidity, and no matching joints, and achieve the effect of high accuracy
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
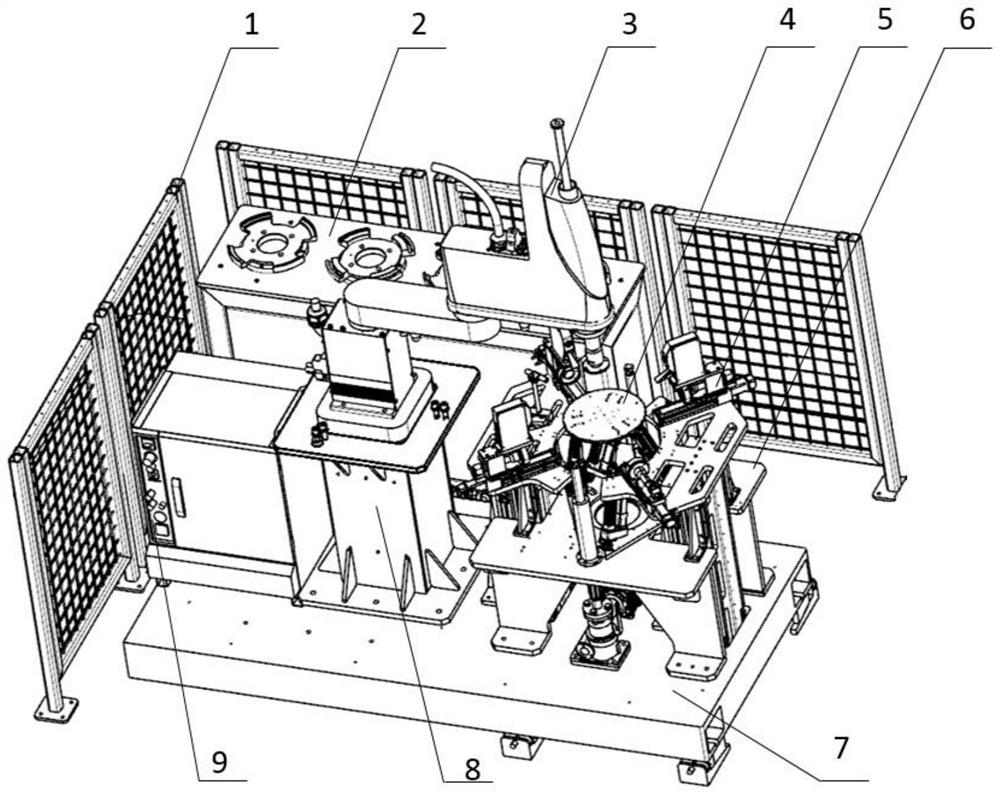
[0056] like Figure 1-Figure 5 As shown, it includes material loading module, assembly module, assembly operation module, measurement and control module and assembly information module;
[0057] The loading module is used for storage and loading of products to be assembled, and mainly includes a product storage library and a product loading table 2 and product tooling formulated according to the structural characteristics of the product and the functional requirements of the assembly system, and the product tooling is disassembled and installed on the product. on the feeding table;
[0058] The assembly module includes a product assembly platform 6 and various brackets, fixing mechanisms, lifting mechanisms, etc. required for assembly, and is used to install the assembly operation module;
[0059] The assembly operation module includes a robot 3 and a six-degree-of-freedom translation platform 4, the six-degree-of-freedom translation platform 4 is installed on a product assem...
Embodiment 2
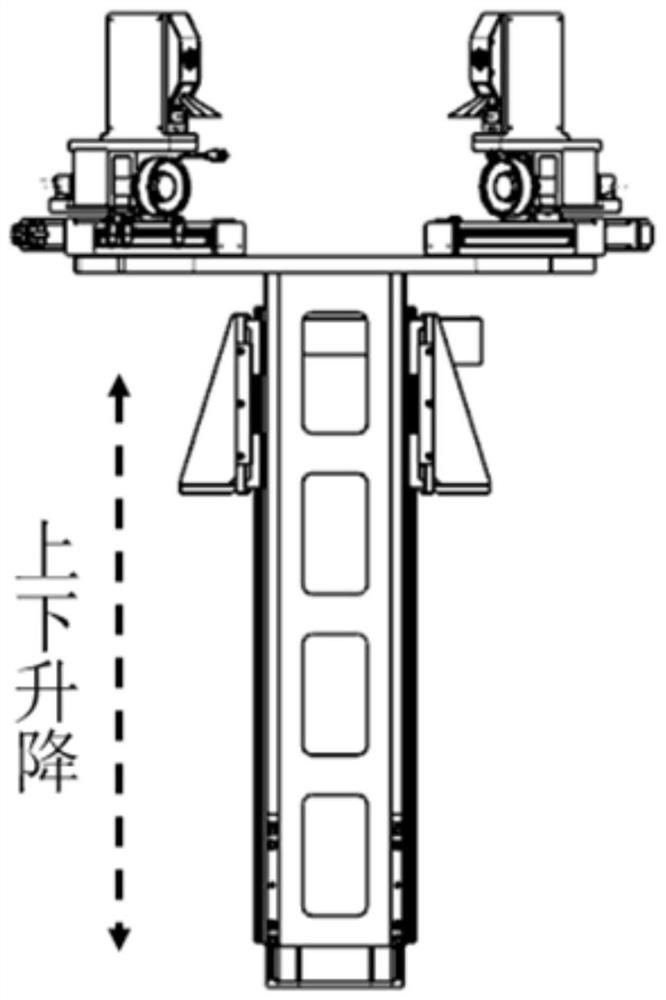
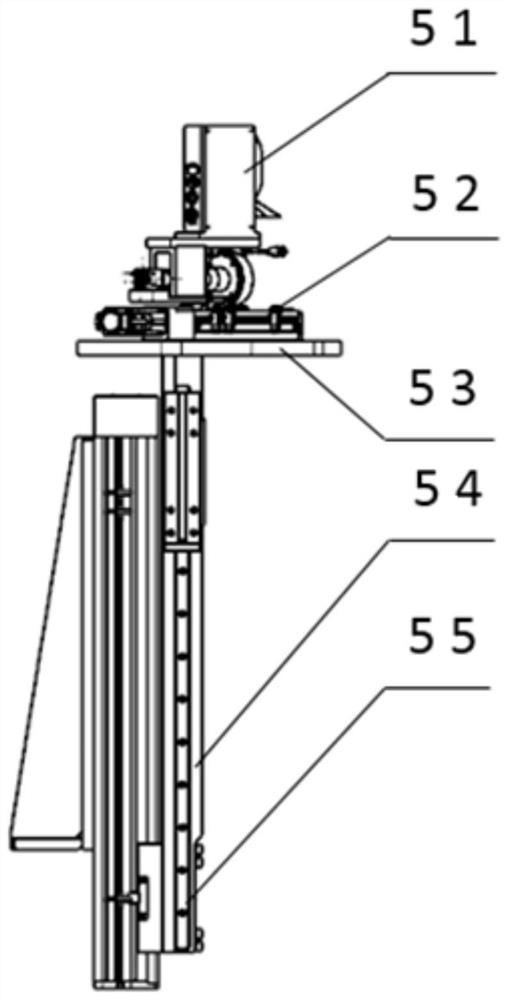
[0076] like Figure 1-Figure 5 As shown, this embodiment is based on Embodiment 1, the measuring device 5 includes a horizontal mounting plate 53, a horizontal translation mechanism and a vertical translation mechanism, and the inner side of the horizontal mounting plate 53 is provided with a semicircular groove;
[0077] The horizontal translation mechanism and the vertical translation mechanism are respectively arranged on the top and the bottom of the horizontal mounting plate 53, the horizontal translation mechanism is arranged on the outside of the six-degree-of-freedom translation stage 4, and the line laser sensor 51 and the visual camera are installed on the On the horizontal translation mechanism;
[0078] Described horizontal translation mechanism comprises two groups of horizontal linear displacement stages 52, and two groups of horizontal linear displacement stages 52 are arranged on the horizontal mounting plate 53 at an angle of 90 °, and the two groups of horizo...
Embodiment 3
[0086] like Figure 1-Figure 5 As shown, this embodiment is based on Embodiment 1, and also includes a base 7 and a robot support base 8;
[0087] The robot 3 is installed on the robot support base 8, and the robot support base 8 and the product assembly platform 6 are both installed on the base 7; it also includes a guardrail 1, and the guardrail 1 is arranged outside the entire assembly system.
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More