

A method for building road depth information model based on vehicle-mounted mobile laser point cloud
A laser point cloud and vehicle-mounted mobile technology, which is applied in 3D modeling, image analysis, image enhancement, etc., can solve the problems of large amount of calculation, blindness, and inaccurate extraction of three-dimensional position and attribute evaluation of diseases, so as to achieve accurate extraction results Effect
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
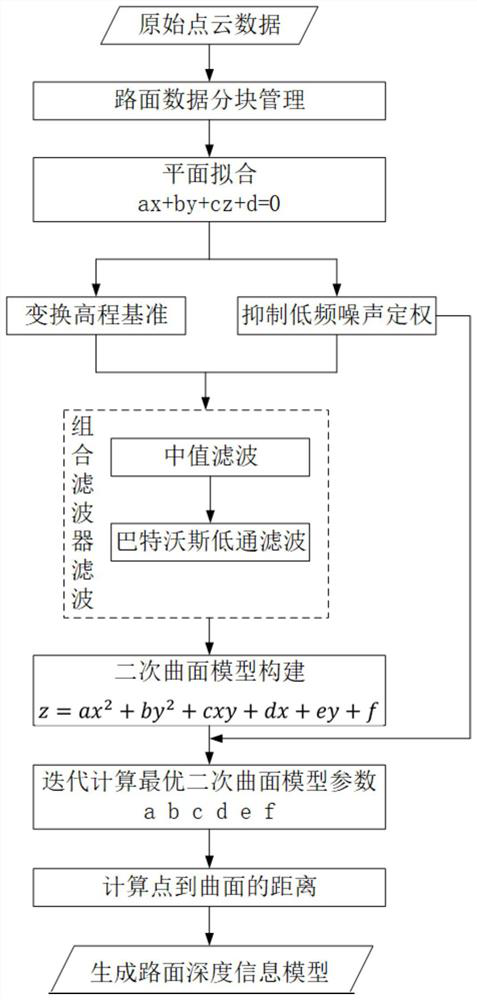
[0106] A road surface depth information model construction method based on vehicle-mounted mobile laser point cloud, such as Figure 1-6 shown, including the following steps:
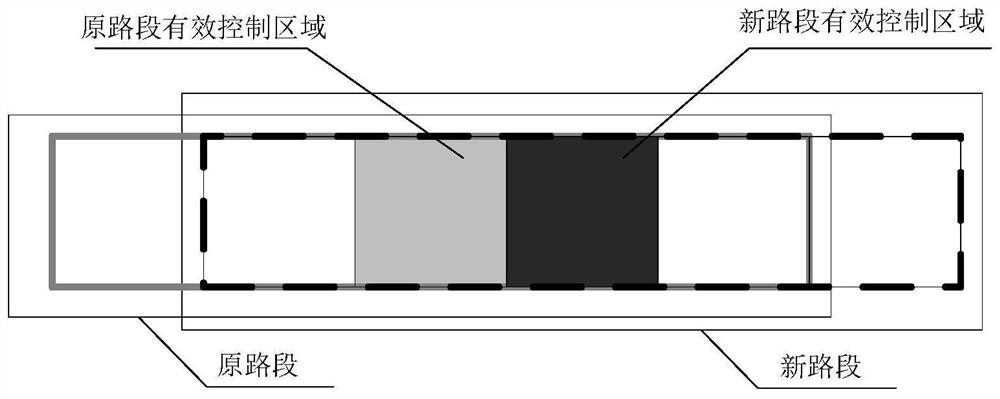
[0107] a. Divide single-lane independent road sections, the overlapping area of two adjacent single-lane independent road sections is 4 / 5, and use single-lane independent road sections as data processing units for data processing;
[0108] The method of dividing single-lane independent road sections is as follows: in the direction of single-lane traffic, it is divided into several parts, and every 5 parts is a single-lane independent road section, and the overlapping area of two adjacent single-lane independent road sections is 4 / 5. The width is the width of a single lane, about 3.5m, and the length and width of each portion are equal.
[0109] Such as figure 2 As shown, the adjacent two single-lane independent road sections are the original road section and the new road section respectively, and...
Embodiment 2
[0115] A method for building a road surface depth information model based on a vehicle-mounted mobile laser point cloud, as described in Embodiment 1, the difference is that step b includes the following sub-steps:
[0116] b1. Calculate the number of iterations according to the ratio relationship between the number n1 of points in the fitting plane and the number n of single-lane independent road section points and the success rate p:
[0117]
[0118] in, Interactive input in the form of a percentage, usually above 80%; p is the expected success rate of interactive input, usually above 90%, which can be determined according to the actual road conditions. The worse the road quality, the smaller the two input parameters, then k An estimate of the number of iterations required to achieve the above requirements;
[0119] Randomly select a three-point series of equations in the single-lane independent road section to solve the plane parameters, and then use the plane as a cons...
Embodiment 3
[0152] A method for building a road surface depth information model based on a vehicle-mounted mobile laser point cloud, as described in Embodiment 2, the difference is that step c includes the following sub-steps:
[0153] c1. Perform local median filtering on the road surface point cloud, specifically:
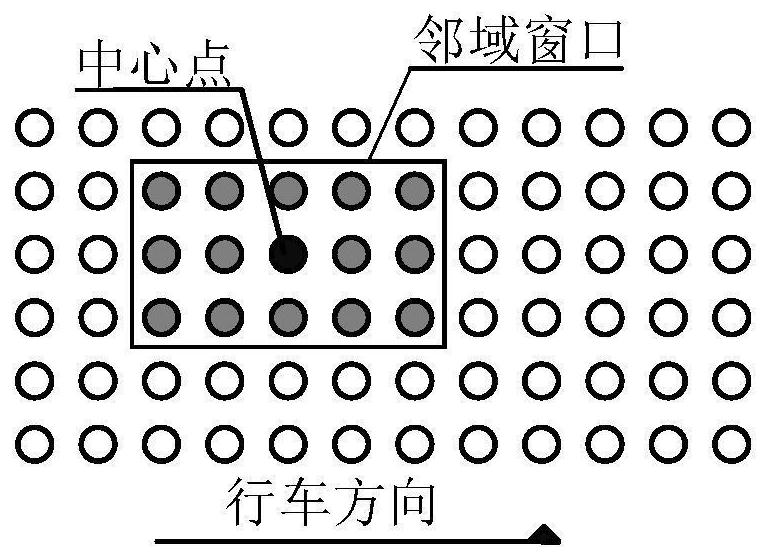
[0154] Use the K-D tree operator to search the neighborhood point set of the target point, and constrain the neighborhood range to a 5×3 long and narrow window distributed along the road direction, such as image 3 shown;
[0155] Sort the 15 points in the neighborhood window from small to large;
[0156] Replace the elevation value of the central point with the median elevation value of the 15 sorted points, and the local median filtering process of the single-lane segmented point cloud is as follows Image 6 shown;
[0157] c2. Perform global Butterworth low-pass filtering on the point cloud after median filtering:
[0158] For the statistical distribution of the relat...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More