

Method and system for detecting ground contact of quadruped robot feet
A quadruped robot and detection method technology, applied in the field of robotics, can solve the problems of difficult electrical wiring, high deployment cost, high mechanical structure, and high material requirements.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
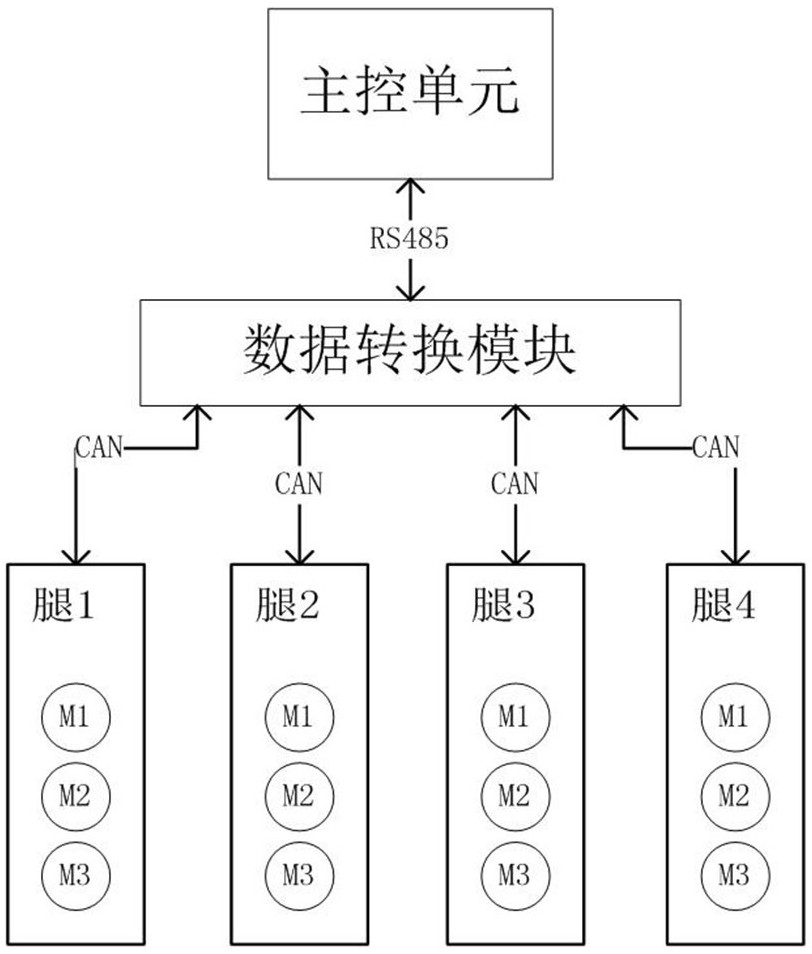
[0078] Such as figure 1 As shown, in this embodiment, each leg of the quadruped robot has three degrees of freedom, and three motors are hung on the same CAN bus, which can feed back data such as motor position, speed, and torque. The data conversion module is responsible for the conversion of CAN bus data and RS485 bus data; the main control unit communicates with the data conversion module through the RS485 bus. The main control unit can choose general main control computer.
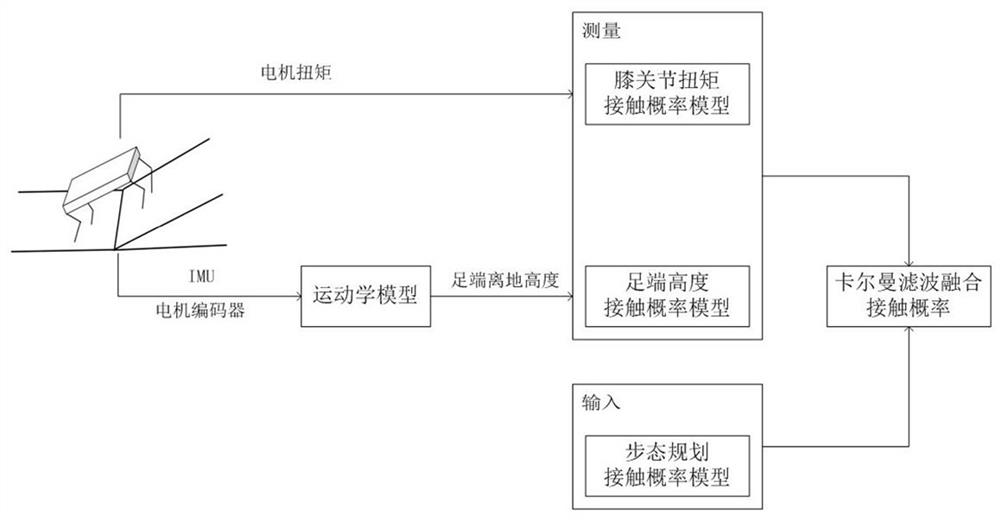
[0079] combine figure 2 This paper introduces in detail the detection method of the quadruped robot's foot touching the ground.
[0080] 1. Kinematics model: The position of the center of mass and the body posture obtained through the attitude calculation of the inertial sensor (IMU), combined with the motor position fed back by the motor encoder, calculate the height of the feet from the ground of each leg as follows: .
[0081] 2. Assuming that when the foot touches the ground, the height of th...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More