

Unmanned aerial vehicle flight control program modeling and verification method based on time automaton
A technology of time automata and verification method, applied in the direction of program control, general control system, control/regulation system, etc., can solve the problems of not fully applicable to unmanned aerial vehicles, not considering wireless communication, etc., to achieve a wide range of applications, improve reliability awesome effect
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
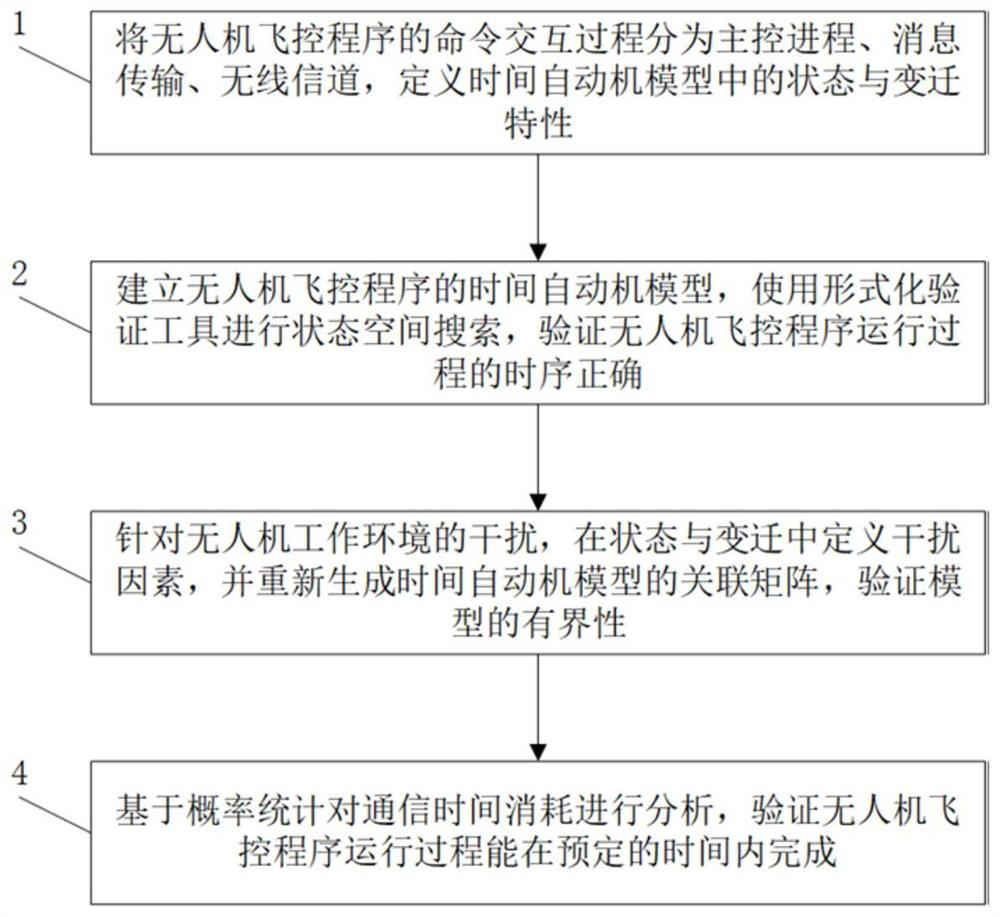
[0032] Embodiment 1, taking a certain existing UAV flight control system as an example, the system can be applied to widely used UAVs such as quadrotor UAVs. During flight, the inertial navigation system, camera, Lidar, etc., can judge its own flight attitude, realize functions such as obstacle avoidance, and can accept external instructions to complete specific tasks. The present invention provides a method for modeling and verifying the flight control program of an unmanned aerial vehicle based on a timed automaton. The modeling and verification process of the flight control program is as follows: figure 1 As shown, it specifically includes the following steps:
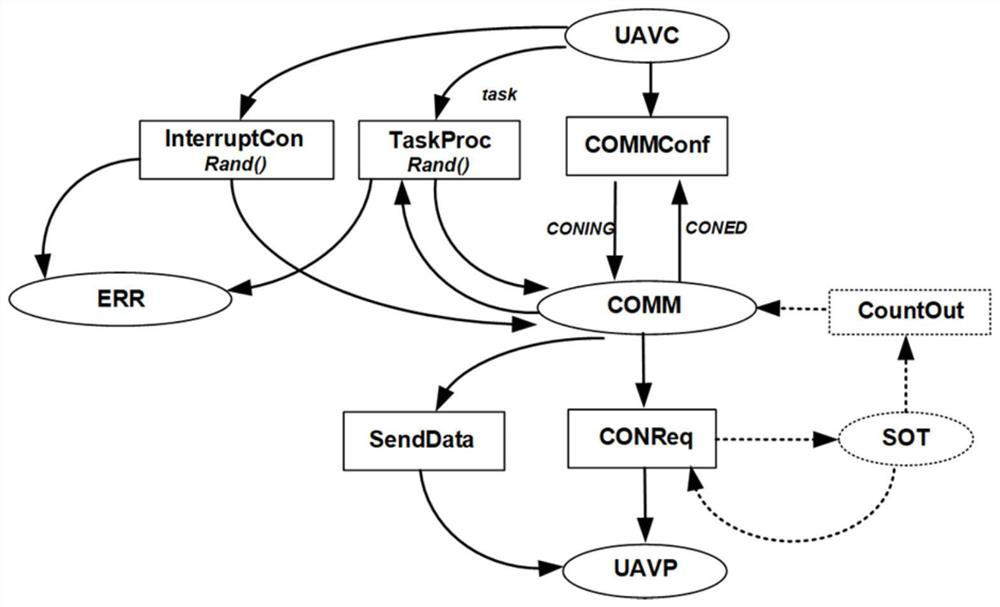
[0033] Step 1. The command interaction process of the UAV flight control program is divided into the main control process, message transmission, and wireless channel. The present invention is based on the formal modeling method of timed automata, and defines the relevant state and transition characteristics in the t...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More