Non-salient pole type permanent magnet brushless hub motor position estimation and calibration method
A permanent magnet brushless, wheel hub motor technology, applied in the direction of motor, control generator, motor generator control, etc., can solve the problems of low precision, inaccurate rotor position estimation, etc., and achieve the effect of improving control performance and reliability
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
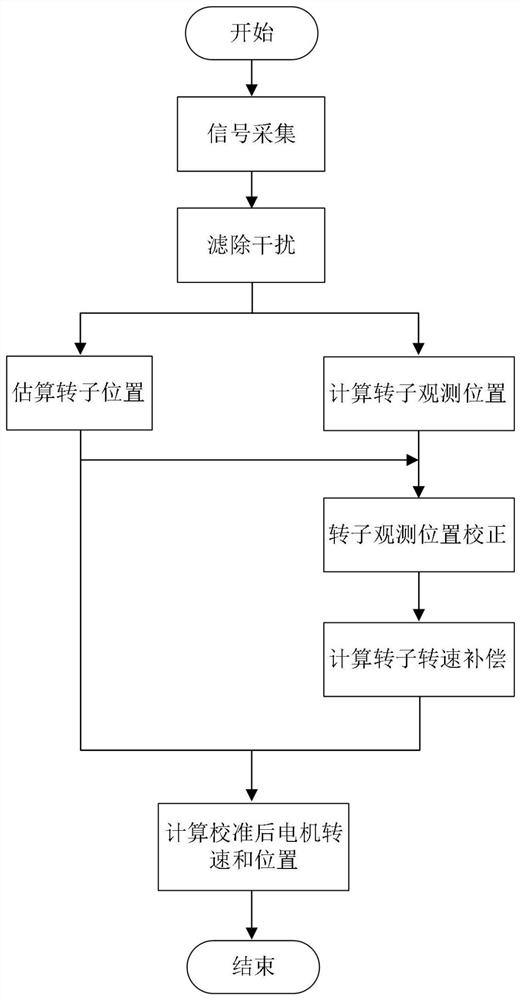
[0043] Such as figure 1 Shown is a method for position estimation and calibration of a hidden pole permanent magnet brushless hub motor, including the following steps,
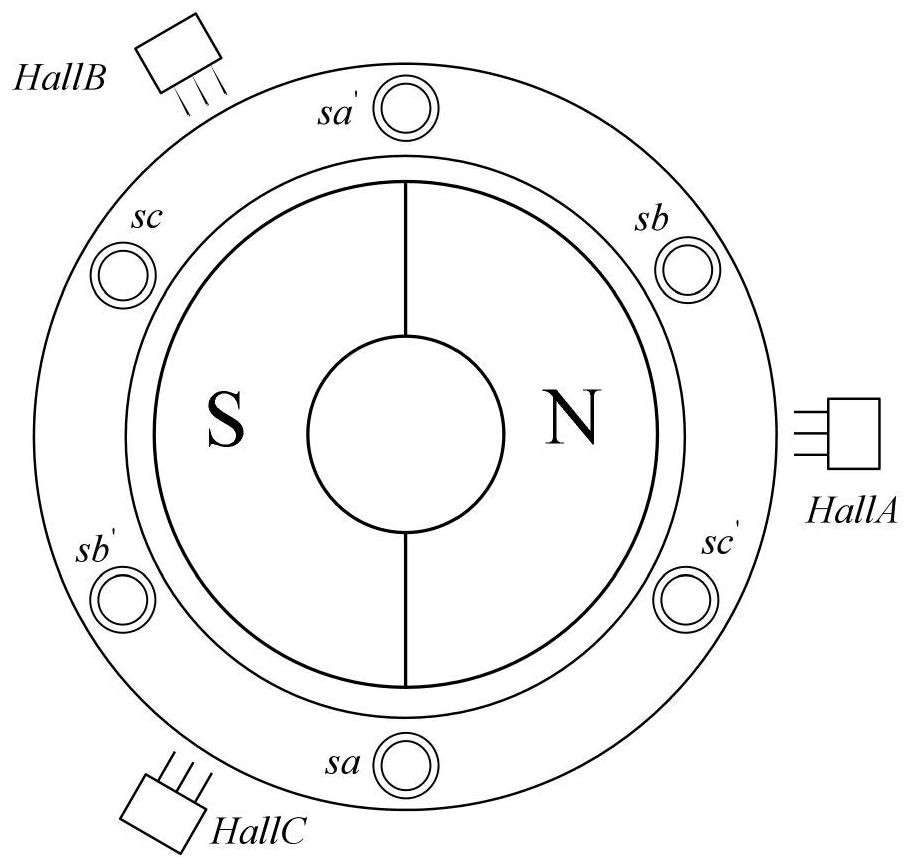
[0044] (1) Signal acquisition: Install three switch-type Hall position sensors around the motor rotor, and divide the rotor into six Hall sectors on average, each Hall sector is π / 3, and obtain three-way Hall Position sensor signal, and collect the three-phase current and voltage of motor operation;
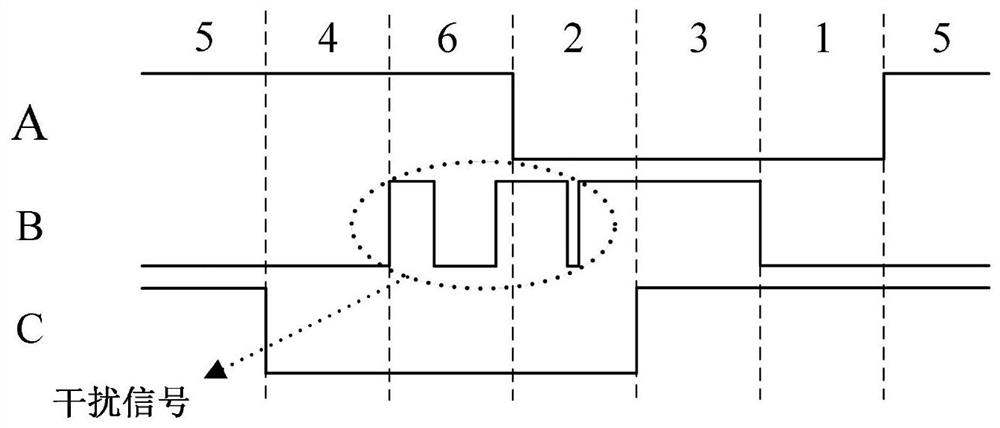
[0045] (2) Filter out interference: set filter rules to filter out electromagnetic interference signals in Hall position sensor signals;
[0046] (3) Estimating the rotor position: According to the signal of the Hall position sensor after filtering out the interference, the average speed method is used to estimate the rotor position θ hand average speed ω h ;
[0047] (4) Calculate the observation position of the rotor: establish the mathematical model of the hidden pole permanent magnet brushless hub motor i...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More