

Intelligent tomato lateral branch trimming robot based on visual inspection
A visual inspection and robot technology, applied in the field of intelligent robots, can solve the problems of high cost and low device work efficiency, and achieve the effects of high adaptability, improved work efficiency and easy trimming
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0038] The following description serves to disclose the present invention to enable those skilled in the art to carry out the present invention. The preferred embodiments described below are only examples, and those skilled in the art can devise other obvious variations.
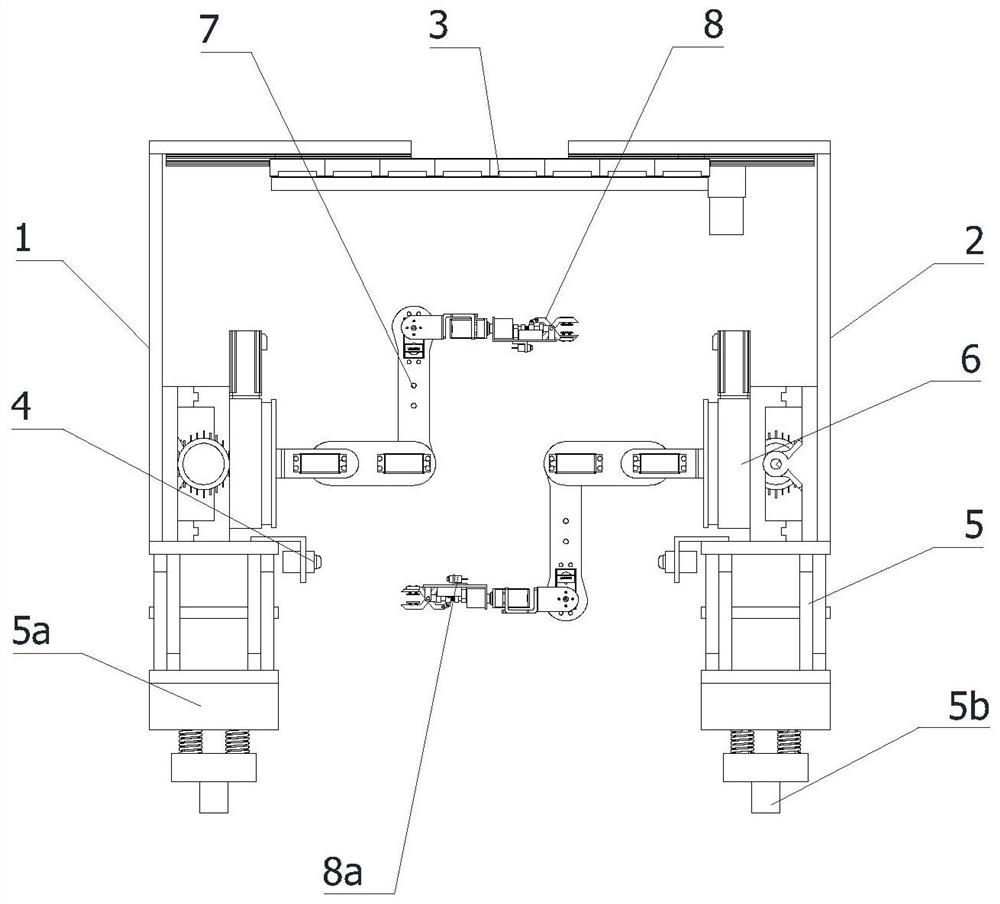
[0039] refer to figure 1 Shown, a tomato side branch intelligent pruning robot based on vision detection, including:
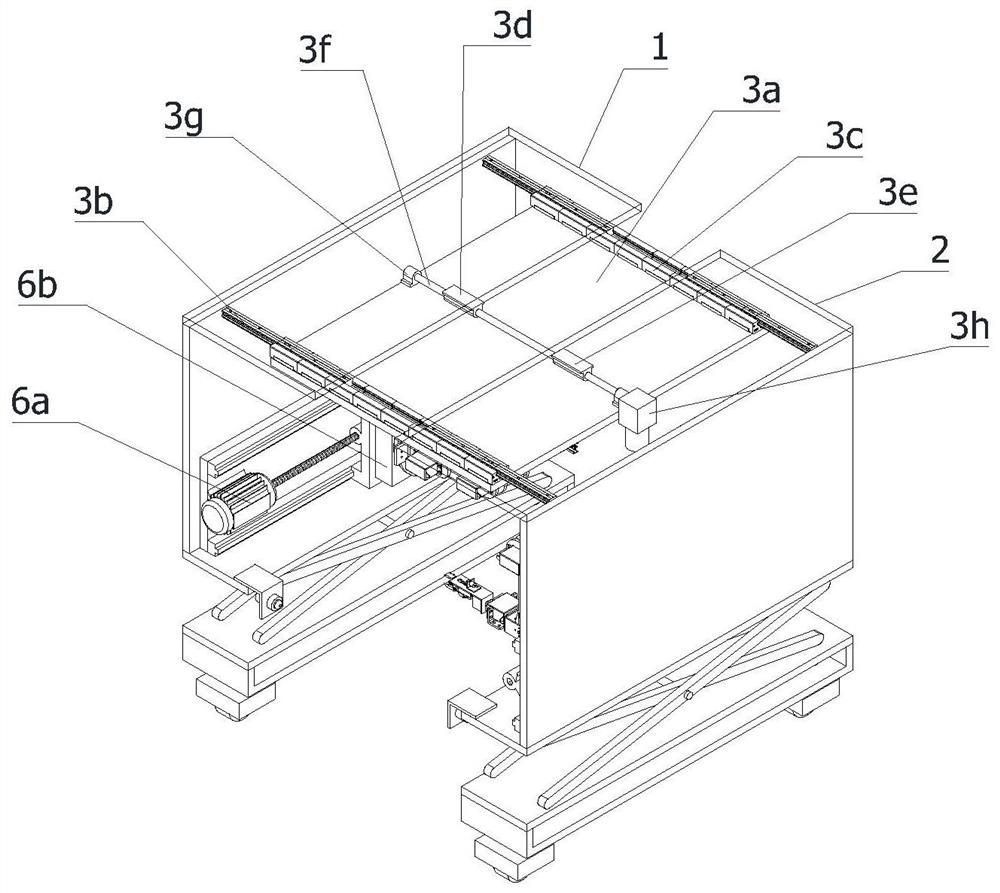
[0040] The first side shift frame 1, the second side shift frame 2 and the adjustment mechanism 3, the top of the side shift frame is fixedly connected with the working ends on both sides of the adjustment mechanism 3, and the start adjustment mechanism 3 can make the first side shift frame 1 and the second side shift frame The side shift frame 2 moves toward or back;
[0041] The first visual detection camera 4, the first visual detection camera 4 is arranged on both sides of the bottom of the first side shift frame 1 and the second side shift frame 2, and the first visual detection camera ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More