

Soft driving structure of lower limb rehabilitation robot
A rehabilitation robot and driving structure technology, which can be used in passive exercise equipment, equipment to help people walk, physical therapy, etc., can solve the problem that the driver's resistance to pressure needs to be further improved.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0032] The present invention will be described in detail below with reference to specific embodiments. The following examples will help those skilled in the art to further understand the present invention, but do not limit the present invention in any form. It should be noted that, for those skilled in the art, several modifications and improvements can be made without departing from the concept of the present invention. These all belong to the protection scope of the present invention.
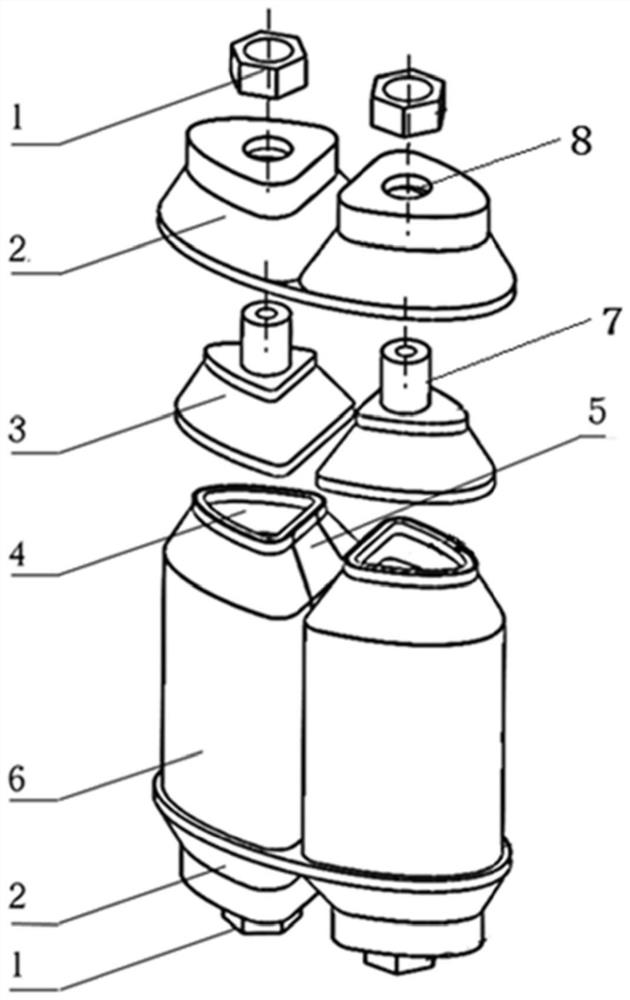
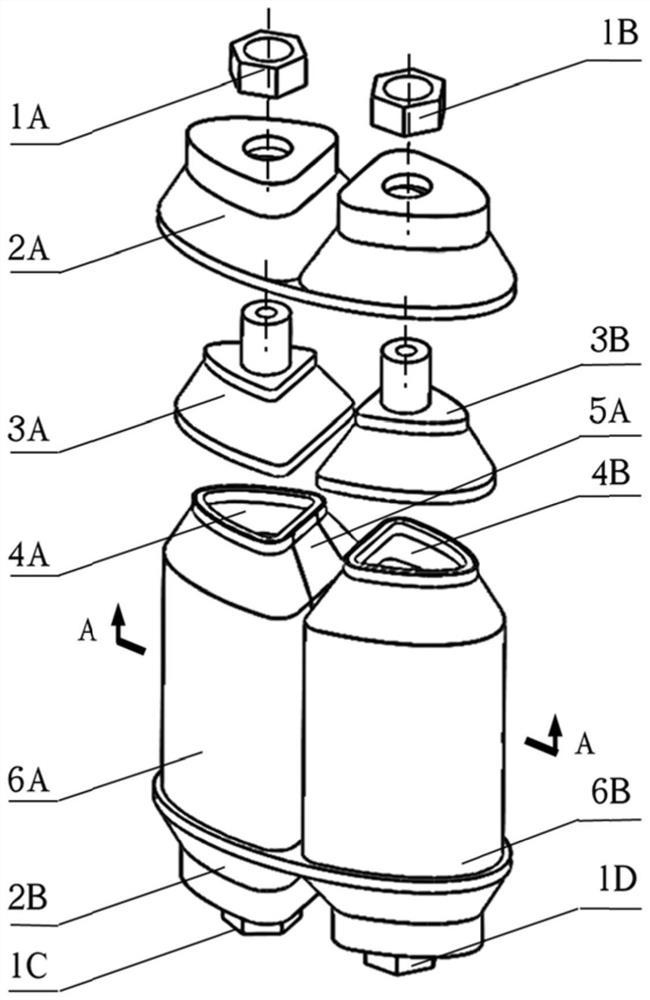
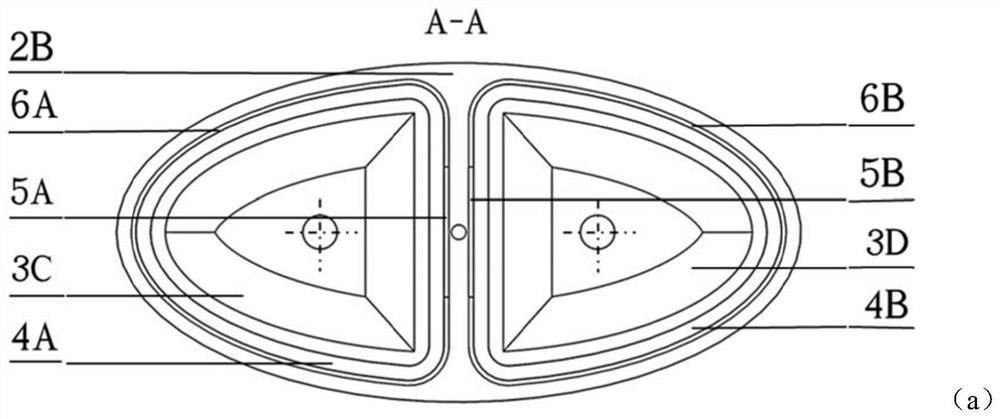
[0033] figure 1 It is a schematic diagram of the software driving structure of the lower limb rehabilitation robot according to a preferred embodiment of the present invention. refer to figure 1 As shown, the software driving structure of the lower limb rehabilitation robot in this embodiment is mainly composed of a double-layer airbag and a fixed connector, wherein the fixed connector includes: a fixed nut 1, an end cover 2, and a vent cover 3; the double-layer airbag includes The soft a...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More