

Brain-like navigation method based on multi-scale grid cell path integration
A grid cell and navigation method technology, applied in neural learning methods, navigation computing tools, biological neural network models, etc., can solve problems such as poor robustness and inaccurate navigation
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
specific Embodiment approach
[0081] 1. Obtain the self-motion information (speed / heading angle) of the UAV
[0082] The vision processing module receives the images collected by the drone's visual sensor in real time, and calculates the linear velocity and heading angle of the drone in the forward and height directions according to the pixel value changes of two adjacent frames of images.
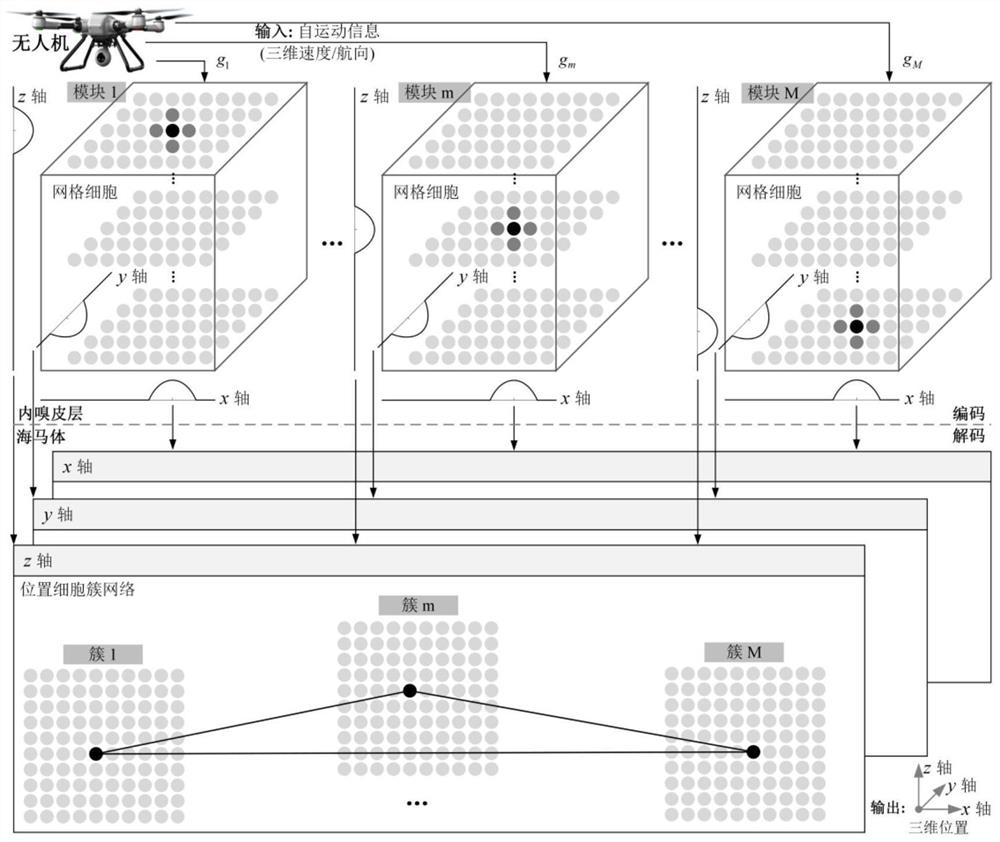
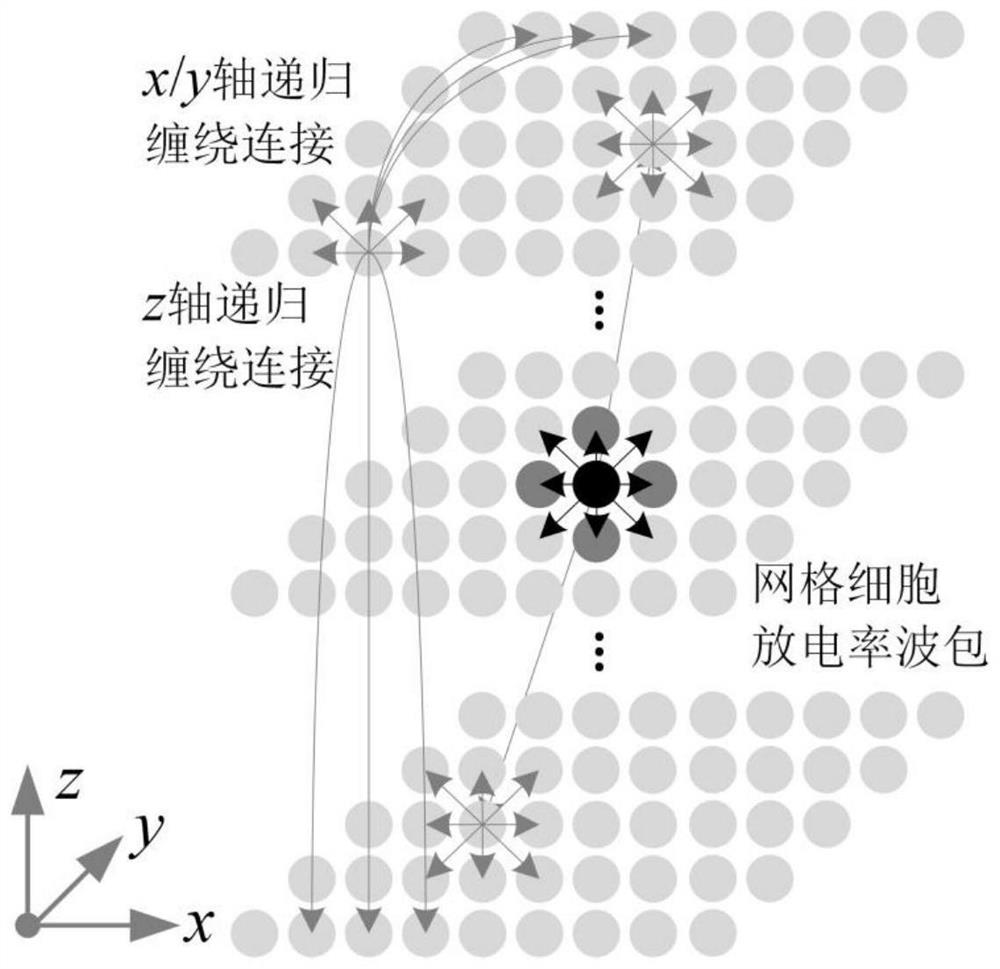
[0083] 2. Construction of a 3D mesh cell network model
[0084] The three-dimensional grid cell network model is constructed based on the three-dimensional attractor neural network. The input is the linear velocity and heading angle of the UAV in the forward and height directions, and the output is the discharge rate wave packet of the grid cell. The topology of the network is as follows: figure 2 As shown, the grid model is:
[0085]
[0086] in, is the activity matrix composed of the firing rates of all cells in the three-dimensional grid cell network at the current moment, γ is the remainder matrix, is the ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More