

Unmanned aerial vehicle return method and device, unmanned aerial vehicle and storage medium
A technology of unmanned aerial vehicles and return points, which is applied in the field of unmanned aerial vehicles to achieve the effects of maximizing operation efficiency, maximizing battery energy utilization, and improving operation efficiency and battery energy utilization
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
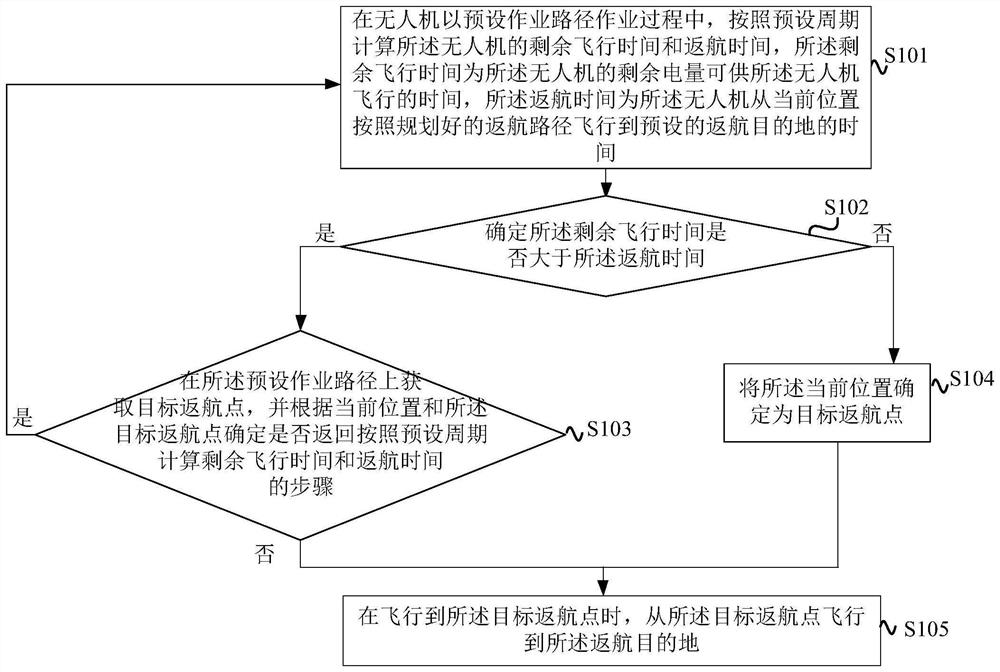
[0033] figure 1 It is a flow chart of a UAV return method provided by Embodiment 1 of the present invention. This embodiment of the present invention is applicable to the situation where the UAV in the control operation returns. This method can be returned by the UAV in the embodiment of the present invention device, the device can be implemented in the form of software and / or hardware, and integrated in the drone of the present invention, such as figure 1 As shown, the UAV return method specifically includes the following steps:
[0034] S101. During the operation process of the UAV with the preset operation path, calculate the remaining flight time and return time of the UAV according to the preset cycle, and the remaining flight time is the remaining power of the UAV. The flight time of the UAV, the return time is the time for the UAV to fly from the current position to the preset return destination according to the planned return path.
[0035] In the embodiment of the p...
Embodiment 2
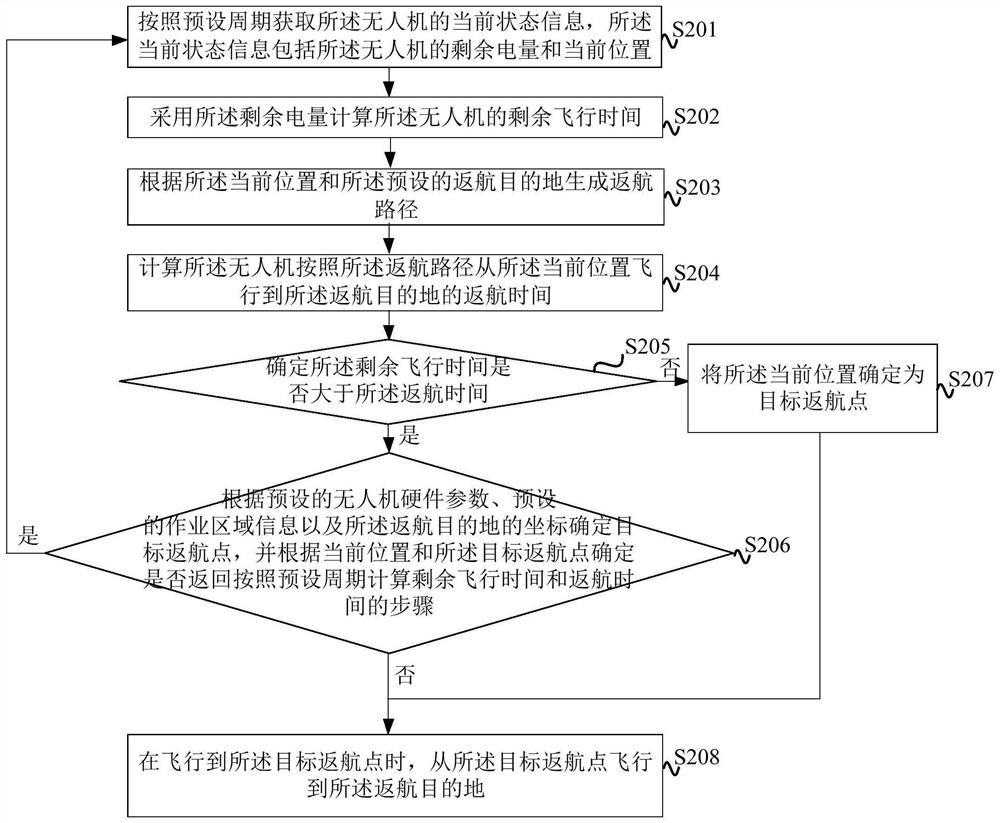
[0051] figure 2 It is a flowchart of a UAV return method provided by Embodiment 2 of the present invention. The embodiment of the present invention is optimized on the basis of the foregoing Embodiment 1. Specifically, as figure 2 As shown, the UAV return method in the embodiment of the present invention may include the following steps:
[0052] S201. Obtain current status information of the drone according to a preset period, where the current status information includes remaining power and a current location of the drone.
[0053] In the embodiment of the present invention, the preset period can be a period set by the user, or a period preset by the developer during the development stage. The period can be set according to the flight speed of the drone. In one example, When the flying speed is fast, a relatively small period can be set, and when the flying speed is slow, a relatively large period can be set. The embodiment of the present invention does not limit the size ...
Embodiment 3
[0114] Figure 5 A schematic structural diagram of a drone return device provided in Embodiment 3 of the present invention, as shown in Figure 5 As shown, the drone return device of the embodiment of the present invention includes:
[0115] The time calculation module 501 is used to calculate the remaining flight time and return time of the drone according to the preset cycle during the operation process of the drone with the preset operation path, and the remaining flight time is the The remaining power is available for the flight time of the UAV, and the return time is the time for the UAV to fly from the current position to the preset return destination according to the planned return path;
[0116] A time determination module 502, configured to determine whether the remaining flight time is greater than the return time;
[0117] A target home point acquisition module 503, configured to acquire a target home point on the preset work path, and return to the time calculati...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More