

Industrial robot trajectory optimization method based on improved genetic algorithm
A technology for improving genetic algorithms and industrial robots, applied in the field of trajectory optimization of industrial robots based on improved genetic algorithms
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0079]The concepts, specific structures, and technical effects of the present invention will be described below in conjunction with examples and drawings to fully understand the objects, programs and effects of the present invention. It should be noted that the features in the embodiments and embodiments in the present application may be combined with each other in the case of an unable conflict.
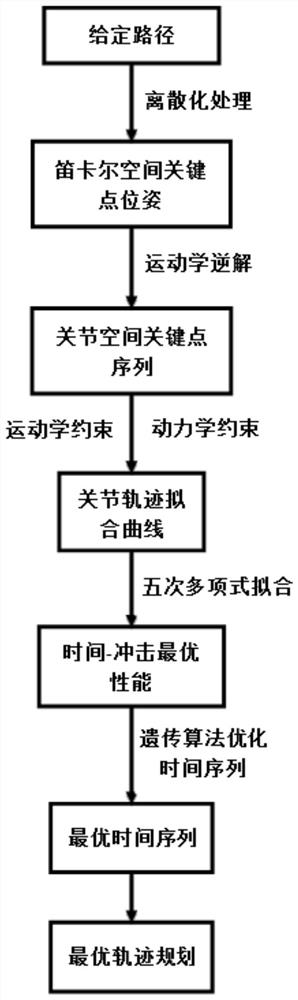
[0080]figure 1 Down to time - impact optimal trajectory planning flow chart, combined belowfigure 1 To explain an industrial robot trajectory optimization method based on improved genetic algorithm, in accordance with the present invention.
[0081]The present invention proposes an industrial robot trajectory optimization method based on improved genetic algorithm, including the following steps:
[0082]Step 1. The complete path is used in the Cartesian space using an arc interpolation and a linear interpolation combination method to obtain a series of key designs;
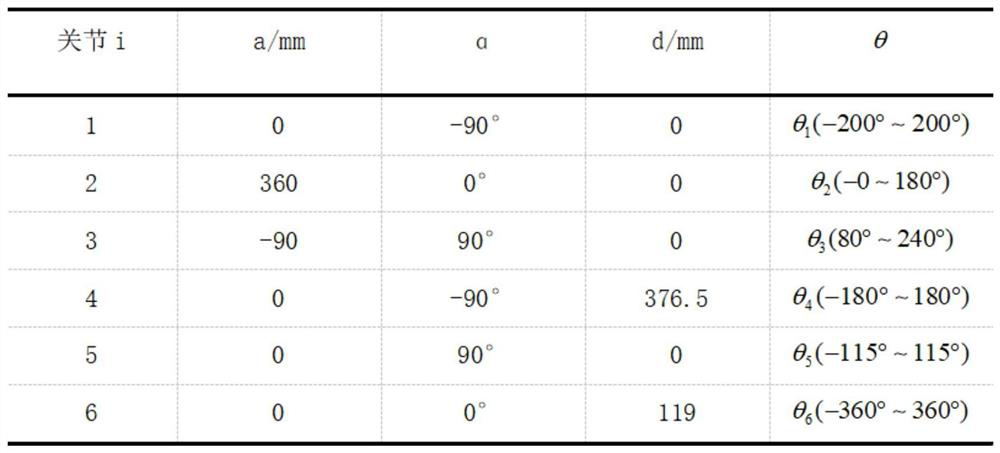
[0083]Step II. Establish a D-H pa...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More