

Planning method for foot end track of rhythm gait of hexapod robot
A hexapod robot and gait technology, applied in navigation calculation tools, complex mathematical operations, etc., can solve the problems of unsmooth speed and acceleration curve, joint robot failure, sudden acceleration and other problems, and achieve smooth speed and acceleration curve. , easy to program, reduce the effect of foot force impact
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0044] In order to enable those skilled in the art to better understand the solution of the present invention, the object of the present invention will be further described in detail below in conjunction with the accompanying drawings and specific embodiments. Apparently, the described embodiments are some, not all, embodiments of the present invention, but the embodiments of the present invention are not therefore limited to the following embodiments. Based on the embodiments of the present invention, all other embodiments obtained by persons of ordinary skill in the art without making creative efforts belong to the protection scope of the present invention.
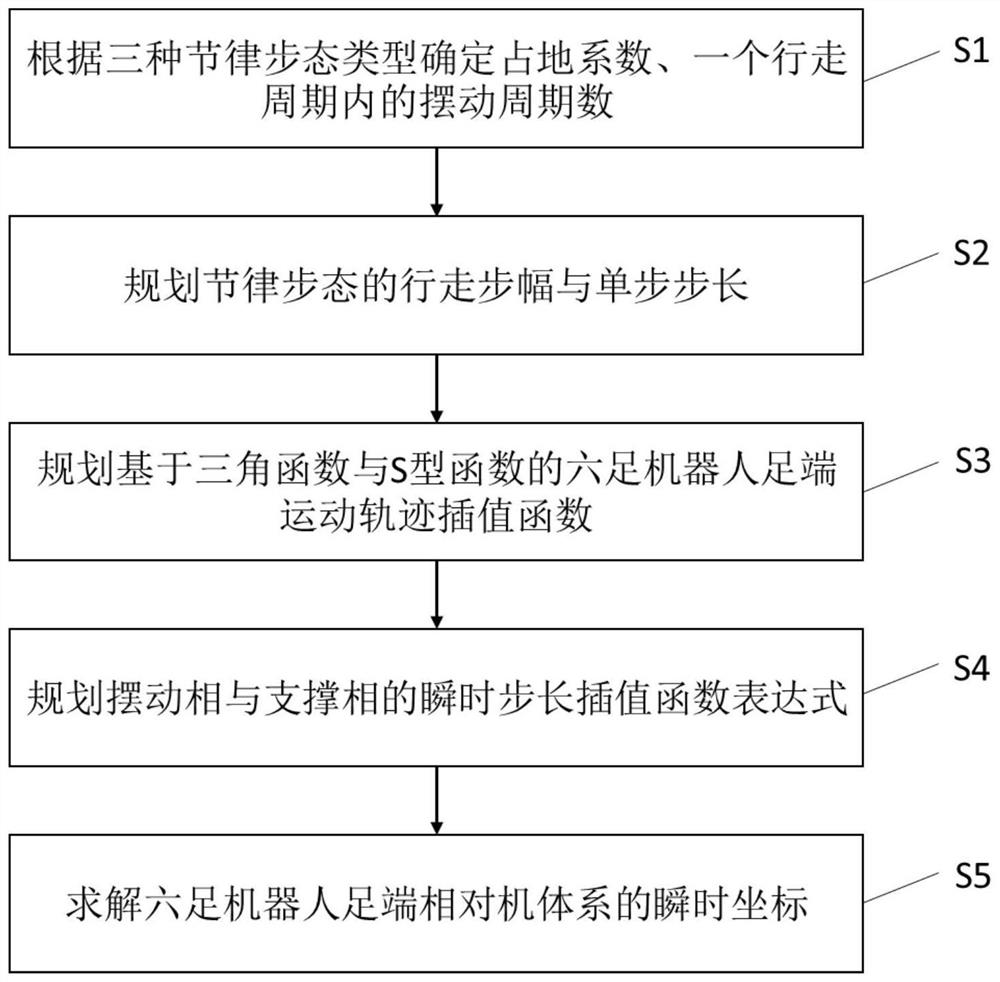
[0045] This embodiment provides a method for planning the foot end trajectory of the rhythmic gait of a hexapod robot. The flow chart of the method is as follows figure 1 shown, including the following steps:
[0046] S1. Determine the land occupation coefficient and the number of swing cycles in one gait cycle accordi...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More