

Reversible impact-resistant mechanical arm and driving method thereof
A mechanical arm and impact-resistant technology, applied in the direction of manipulators, program-controlled manipulators, chucks, etc., to achieve the effect of reducing injuries
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0027] The present invention will be further described below in conjunction with accompanying drawing.
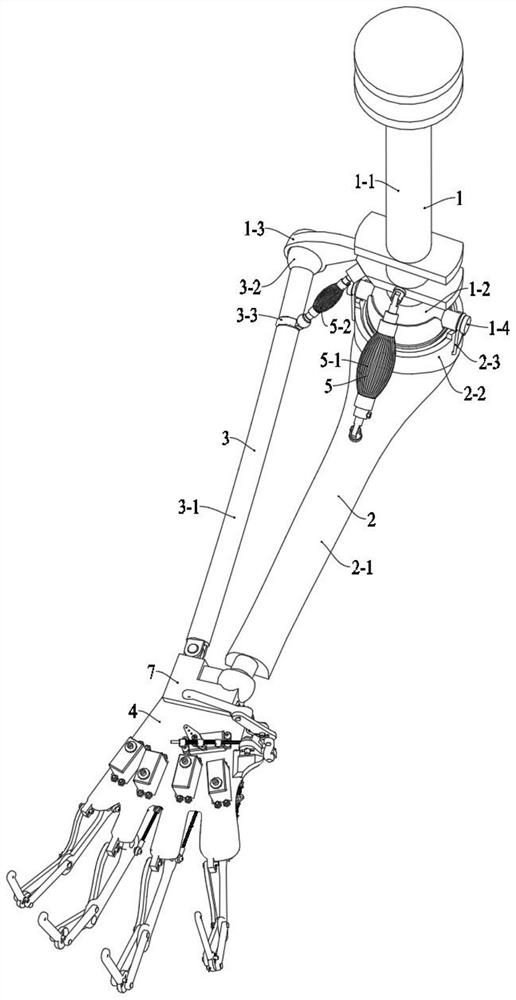
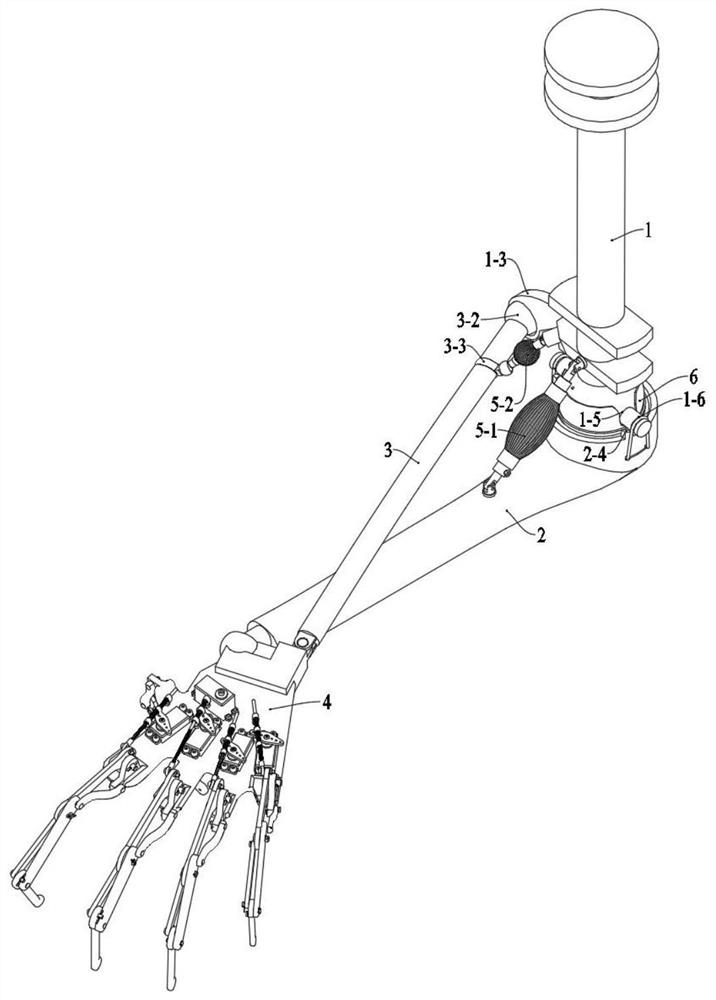
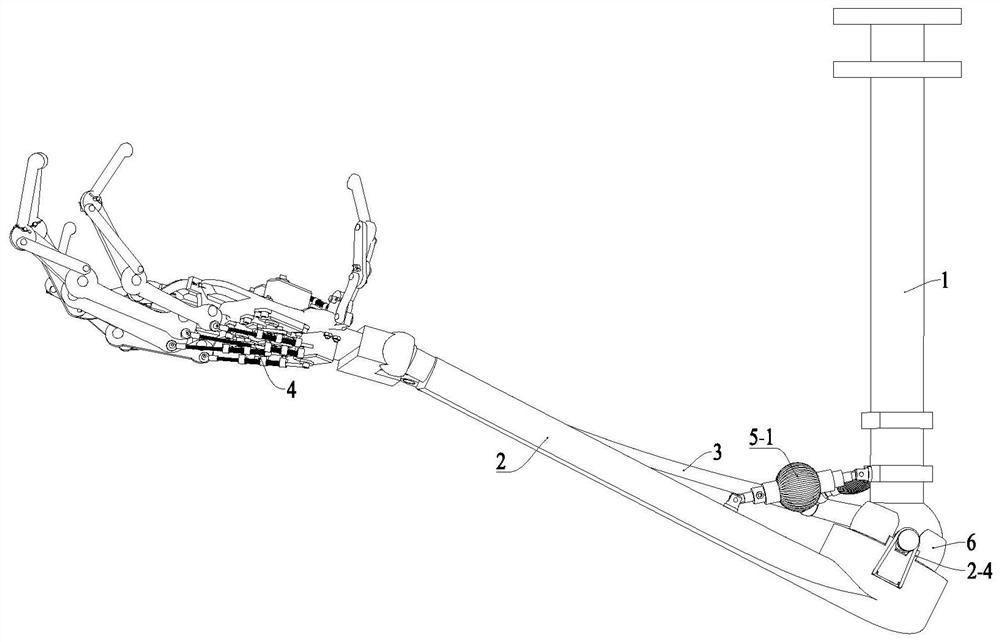
[0028] Such as Figure 1-5 As shown, a reversible impact-resistant mechanical arm includes a humerus imitation module 1 , an ulna imitation module 2 , a radius imitation module 3 , an actuator mounting block 7 , a manipulator module 4 and a manipulator driving module 5 . The manipulator module 4 is installed on the actuator mounting block 7 and has a grabbing function; one end of the imitation ulna module 2 and the imitation radius module 3 are connected with the imitation humerus module 1, and the other ends are connected with the actuator mounting block 7, respectively. To drive the actuator mounting block 7 to swing and turn over.
[0029] The imitation humerus module 1 includes a humerus rod 1-1, a humerus joint ball 1-2, a radial ball joint seat 1-3 and a pivot pin 1-4; the humerus joint ball 1-2 is fixed on the humerus rod 1-1 The lower end; the humerus joint ball 1...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More