

Automatic operation robot and control method for automatic operation according to planned path
A technology for operating robots and path planning, applied in the field of robotics, can solve the problems of long time-consuming control process and low path control accuracy, and achieve the effects of reducing labor costs, shortening the time-consuming control of track switching, and improving the quality of automatic operations
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
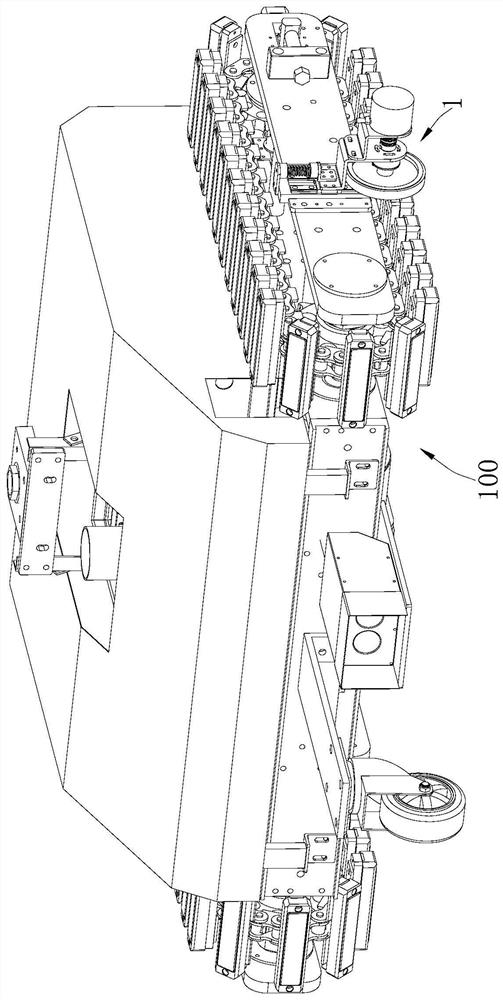
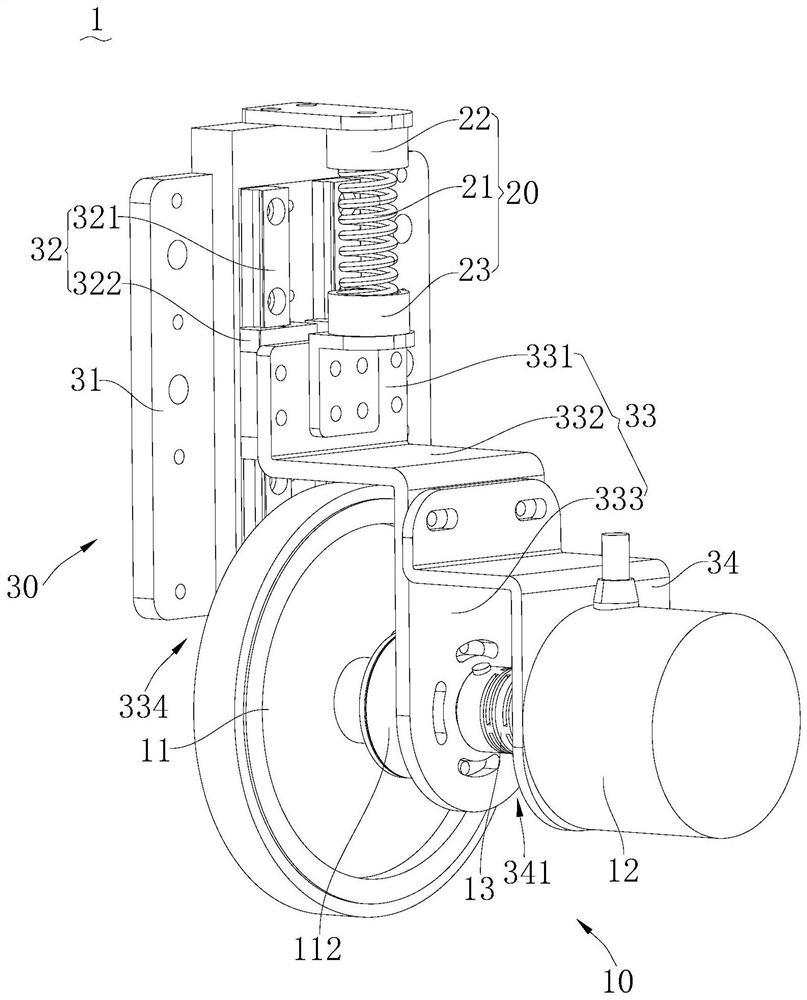
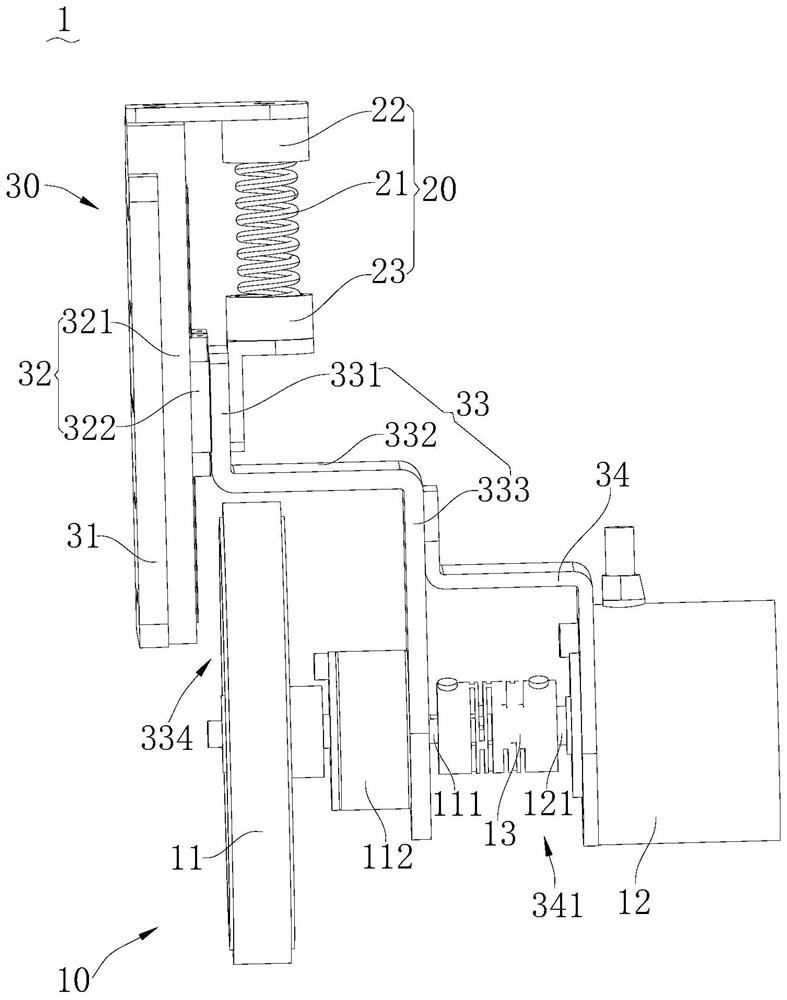
[0061] like Figure 1~4 As shown, the embodiment of the present invention provides an automatic operation robot, which is suitable for performing various high-altitude operations on the facade operation surface, such as performing tasks such as wall surface cleaning, inspection, rust removal, and spraying. This automatic working robot comprises robot main body 100, and robot main body 100 has the controller (not shown) that is used to control robot main body 100 automatic mobile operations, and automatic working robot also comprises the dynamic inclination sensor (not shown in figure) that is installed on the robot main body 100 ), a ranging sensor (not shown) and a displacement measuring mechanism 1, wherein the dynamic inclination sensor is used to measure the steering angle of the robot body 100, thereby detecting the roll and pitch attitude information of the robot body 100 in real time; the ranging sensor is used for Measuring the climbing height of the robot body 100, th...
Embodiment 2
[0078] like Figure 5 As shown, the present embodiment provides a specific connection between the dynamic inclination sensor, the laser ranging sensor and the incremental photoelectric rotary encoder of the displacement measuring mechanism 1 of the automatic working robot in the first embodiment and the controller in the robot main body 100. connection method, such as Figure 5 As shown, in this embodiment, the controller of the robot main body 100 is an STM32 microcontroller, and the STM32 microcontroller includes an RS232 communication interface, an RS485, a quadrature encoder interface and two servo motor control interfaces.
[0079] The dynamic inclination sensor is connected with the controller of the robot main body 100 through the RS232 communication interface, and the posture information detected by it is fed back to the controller in the form of a digital signal; the laser ranging sensor is connected with the controller of the robot main body 100 through the RS485 com...
Embodiment 3
[0082] like Image 6 , Figure 7 and Figures 9 to 12 As shown, the second embodiment of the present invention provides a control method for a robot to automatically work according to a planned path, specifically, as Image 6 As shown, this method is especially suitable for controlling the wall-climbing robot to perform various high-altitude operations on the facade operation surface, such as performing tasks such as wall cleaning, inspection, rust removal and spraying. Specifically, the control method includes the following steps:
[0083] S10. Provide the automatic working robot provided in Embodiment 1 above, and place the automatic working robot on the bottom of a working track on the working surface. Specifically, several working tracks of different shapes are arranged in parallel on the working surface, and each working track extends upwards from the bottom of the working surface to the top of the working surface, and the main body of the robot 100 can complete the wo...
PUM
| Property | Measurement | Unit |
|---|---|---|
| Length | aaaaa | aaaaa |
| Length | aaaaa | aaaaa |
Abstract
Description
Claims
Application Information
 Login to View More
Login to View More