

Rotary inertial navigation active-disturbance-rejection controller parameter setting method based on adaptive genetic algorithm
An active disturbance rejection controller and genetic algorithm technology, applied in the field of control, can solve problems such as the inability to guarantee the overall stability of the system, the shortened life of the actuator, and the violent vibration of the actuator, and achieve good dynamic quality, improved precision, and fast response. Effect
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image



Examples
Embodiment Construction
[0075] The present invention will be further elaborated below in conjunction with embodiment.
[0076] Based on the high-precision and fast-response index control requirements of the new multi-axis inertial navigation system, the present invention designs the optimal ADRC parameters by using an adaptive genetic algorithm, thereby realizing high-precision indexing of the complex rotating mechanism of the new inertial navigation system control.
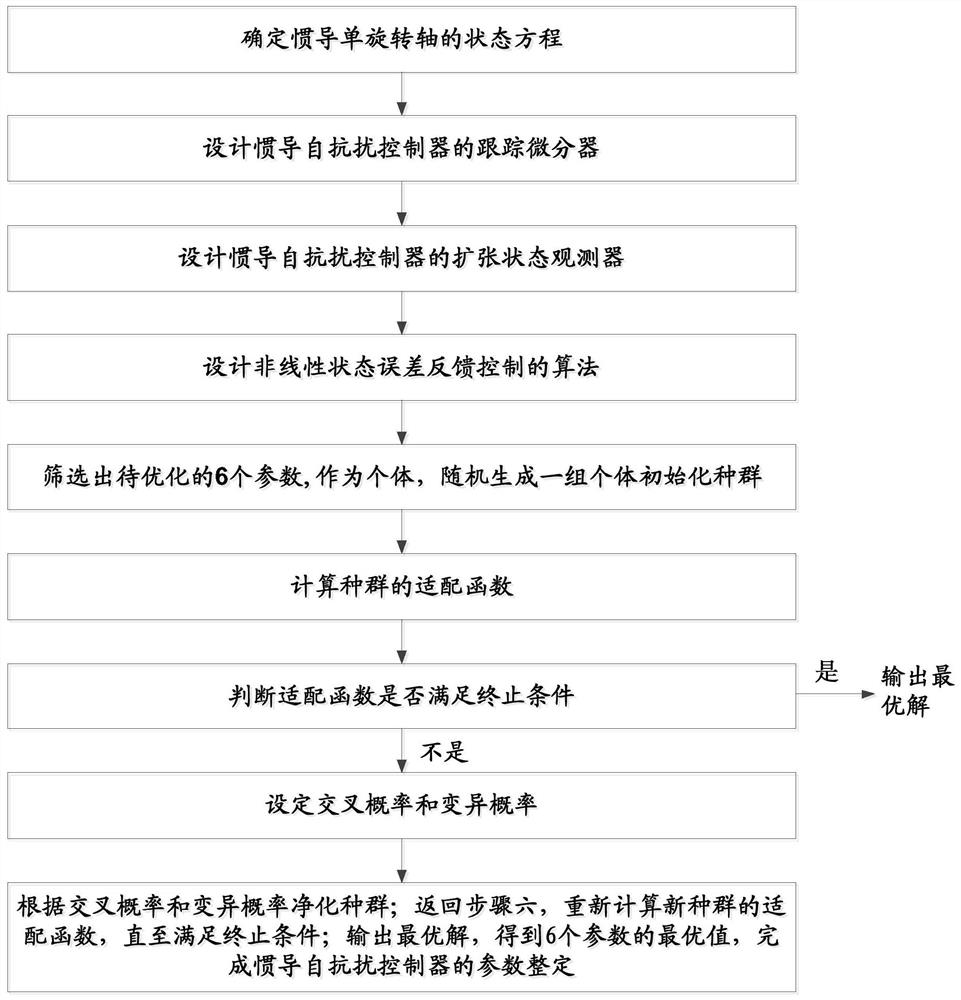
[0077] Based on the adaptive genetic algorithm, the parameter tuning method of the rotary inertial navigation ADR controller, such as figure 1 As shown, it specifically includes the following steps:
[0078] Step 1. Determine the state equation of the inertial navigation single rotation axis; the single rotation axis is a second-order nonlinear system, and its state equation is:
[0079]
[0080] where x 1 ,x 2 Both are the state variables of the single-rotation axis system; where, x 1 is the angle, x 2 is the angular rate;
...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More