

Method and device for detecting occurrence of side rockfall of unmanned vehicle
A technology for unmanned vehicles and falling rocks, applied to devices using optical methods, measuring devices, optical devices, etc., can solve problems such as being affected by terrain, low degree of automation, and inability to process data in real time
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
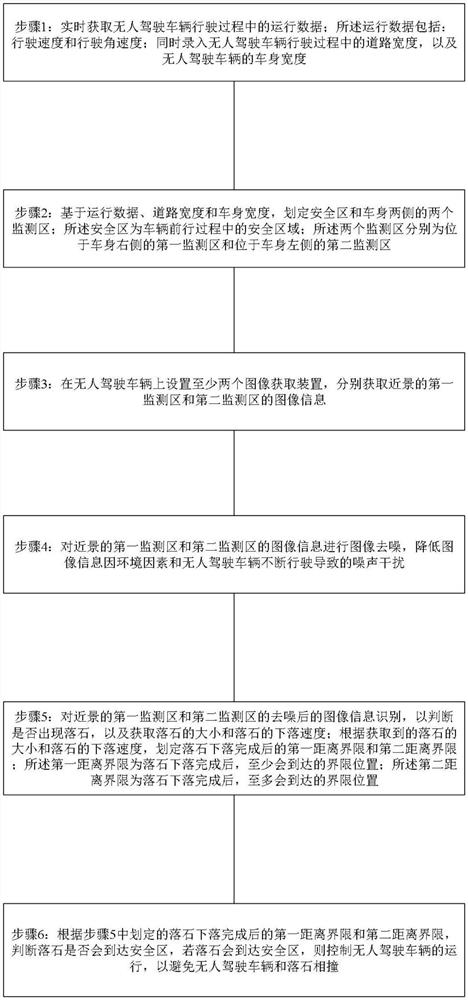
[0031] like figure 1 Shown, unmanned vehicle detects the method that side rockfall occurs, it is characterized in that, described method carries out the following steps:
[0032] Step 1: Obtain real-time operating data during the driving process of the unmanned vehicle; the operating data includes: driving speed and driving angular velocity; at the same time, enter the road width during the driving process of the unmanned vehicle and the body width of the unmanned vehicle;
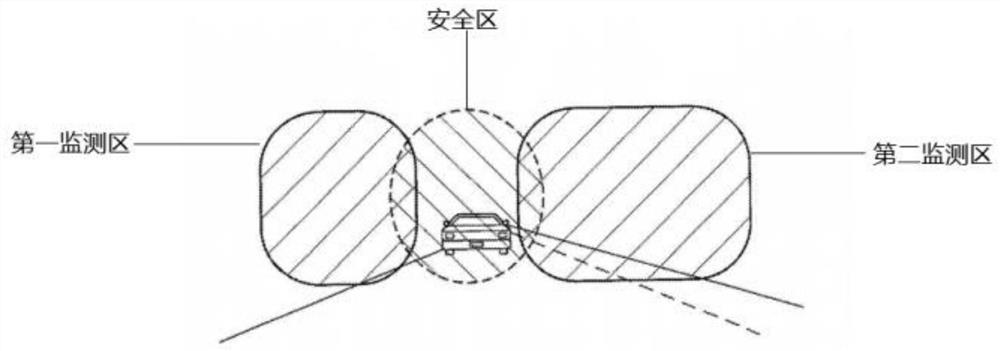
[0033] Step 2: Based on the operating data, road width and vehicle body width, delineate the safety zone and two monitoring areas on both sides of the vehicle body; the safety zone is the safety zone during the vehicle’s forward movement; The first monitoring area on the right side of the vehicle body and the second monitoring area on the left side of the vehicle body;
[0034] Step 3: Install at least two image acquisition devices on the unmanned vehicle to acquire the image information of the first moni...
Embodiment 2
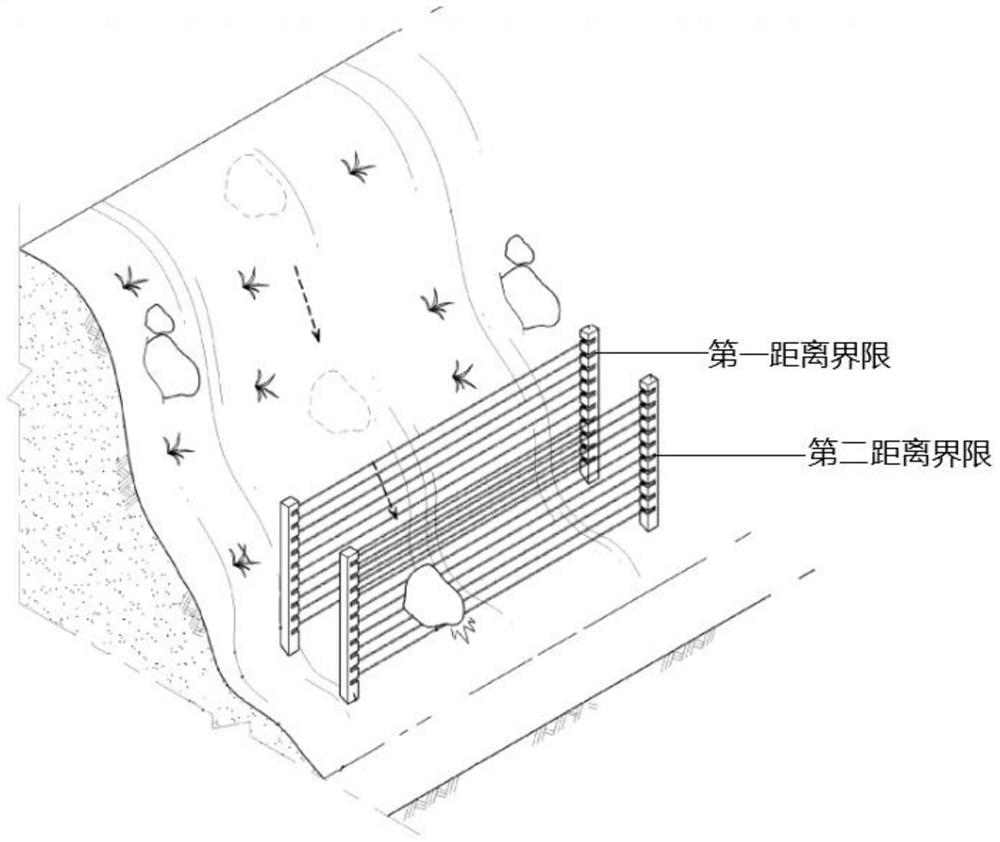
[0040] On the basis of the previous embodiment, the method further includes: setting up two additional image acquisition devices to respectively acquire the image information of the first monitoring area and the second monitoring area of the distant scene; The image information in the second monitoring area is image denoised to reduce the noise interference caused by environmental factors and unmanned vehicles in the image information; the image information after denoising in the first monitoring area and the second monitoring area of the distant view is identified, and the Judging whether there is a rockfall, and obtaining the size of the rockfall and the falling speed of the rockfall; according to the obtained size of the rockfall and the falling speed of the rockfall, delineate the first distance limit and the second distance limit after the falling rockfall is completed; the first The distance limit is at least the limit position that will be reached after the fall of t...
Embodiment 3
[0042] On the basis of the previous embodiment, the method further includes: performing camera calibration on the image acquisition device before acquiring image information through the pre-image acquisition device.
[0043] Specifically, in the image measurement process and machine vision applications, in order to determine the relationship between the three-dimensional geometric position of a point on the surface of a space object and its corresponding point in the image, it is necessary to establish a geometric model of camera imaging. These geometric model parameters are the camera parameter. Under most conditions, these parameters must be obtained through experiments and calculations. This process of solving parameters is called camera calibration (or camera calibration). Whether it is in image measurement or machine vision applications, the calibration of camera parameters is a very critical link. The accuracy of the calibration results and the stability of the algorithm...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More