

Glass curtain wall cleaning method and bionic robot
A bionic robot and glass curtain wall technology, applied in the field of bionic robots, can solve the problems of low cleaning efficiency, repeated cleaning or omission, incompleteness, etc.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
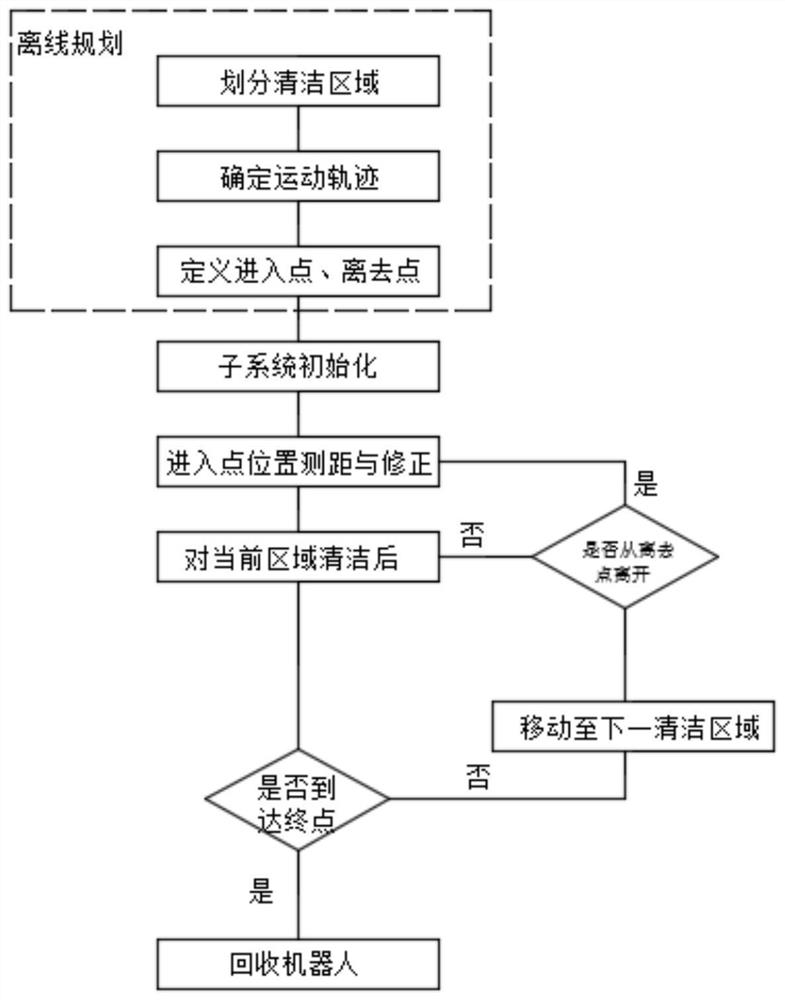
[0033]The present embodiment provides a glass curtain wall cleaning method, comprising the steps of:
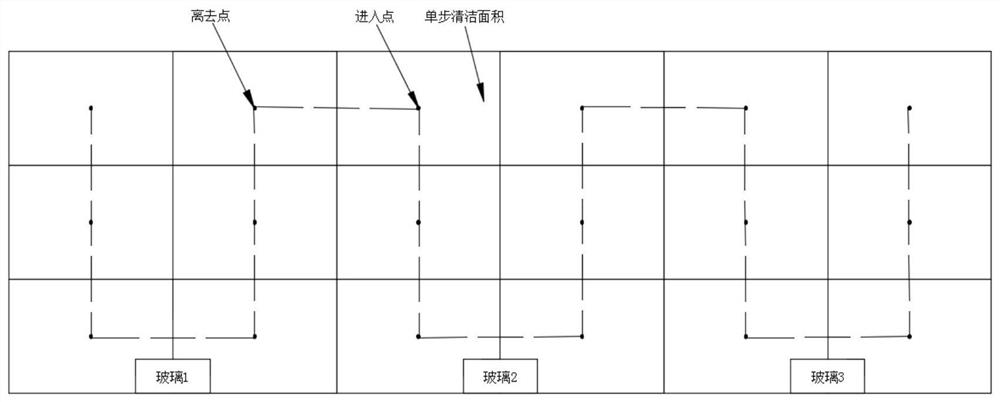
[0034] S1. According to the single-step cleaning area of the bionic robot, the glass to be cleaned is divided into several equal-area cleaning areas;
[0035] S2. Determine the starting point of the bionic robot, and sequentially connect the center points of all cleaning areas to form the trajectory of the bionic robot;
[0036] S3. Define the center point of the first cleaning area of each glass as the entry point;
[0037] S4. Control the single-step crawling distance of the crawling foot of the bionic robot according to the distance from the center point of the adjacent cleaning area, so that the bionic robot traverses the center points of all cleaning areas according to the motion trajectory and cleans each cleaning area;
[0038] Wherein, in step S4, when the bionic robot crawls to the cleaning area where the entry point is located, the position of the bionic robot ...
Embodiment 2
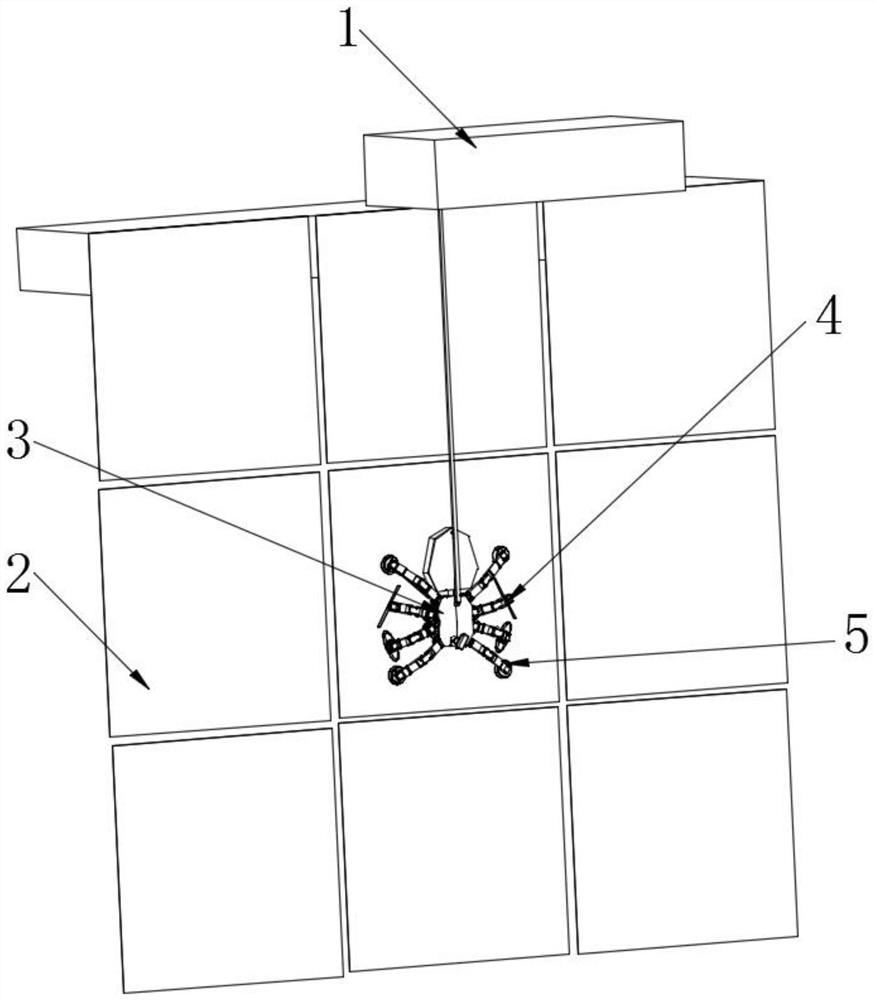
[0057] This embodiment provides a bionic robot implementing the glass curtain wall cleaning method in Embodiment 1, including a trunk 3, a working foot 4, a crawling foot 5 and a distance measuring sensor 6; the working foot 4 is connected with the trunk 3 for cleaning glass 2; the crawling foot 5 is connected with the trunk 3 for keeping the trunk 3 fixed and driving the trunk 3 to crawl; the distance measuring sensor 6 is connected with the trunk 3 for measuring the distance between the central point of the cleaning area of the bionic robot and the length and width of the glass 2 vertical distance.
[0058] The bionic robot disclosed in this embodiment drives the bionic robot to crawl through the crawling foot 5, so that the bionic robot traverses the center points of all cleaning areas, and cleans all the cleaning areas through the working foot 4; when the bionic robot crawls to a certain piece of glass 2 When entering the cleaning area where the point is located, the pos...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More