

Multi-degree-of-freedom high-precision motion platform based on few-branch-chain mechanism
A technology of motion platform and degree of freedom, which is applied in the direction of generator/motor, piezoelectric effect/electrostrictive or magnetostrictive motor, installation, etc., which can solve the problems of short service life, large volume, low sensitivity, etc.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0028] The present invention will be described in further detail below in conjunction with the accompanying drawings and specific examples.
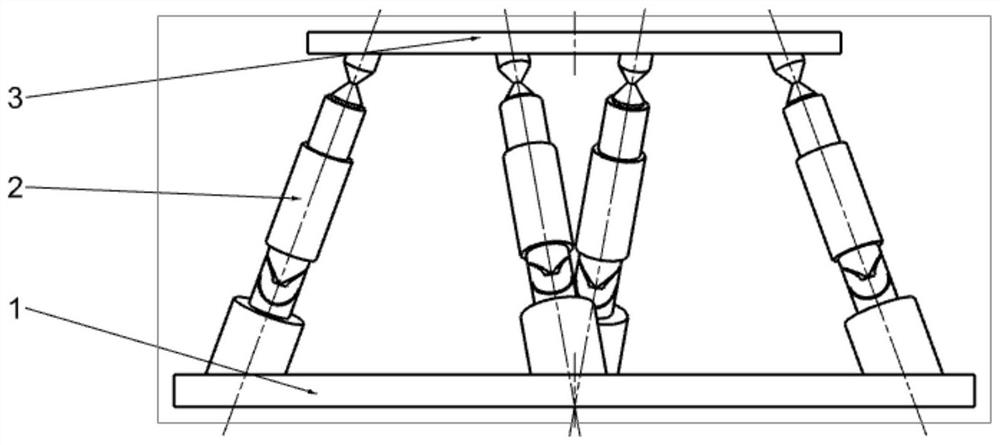
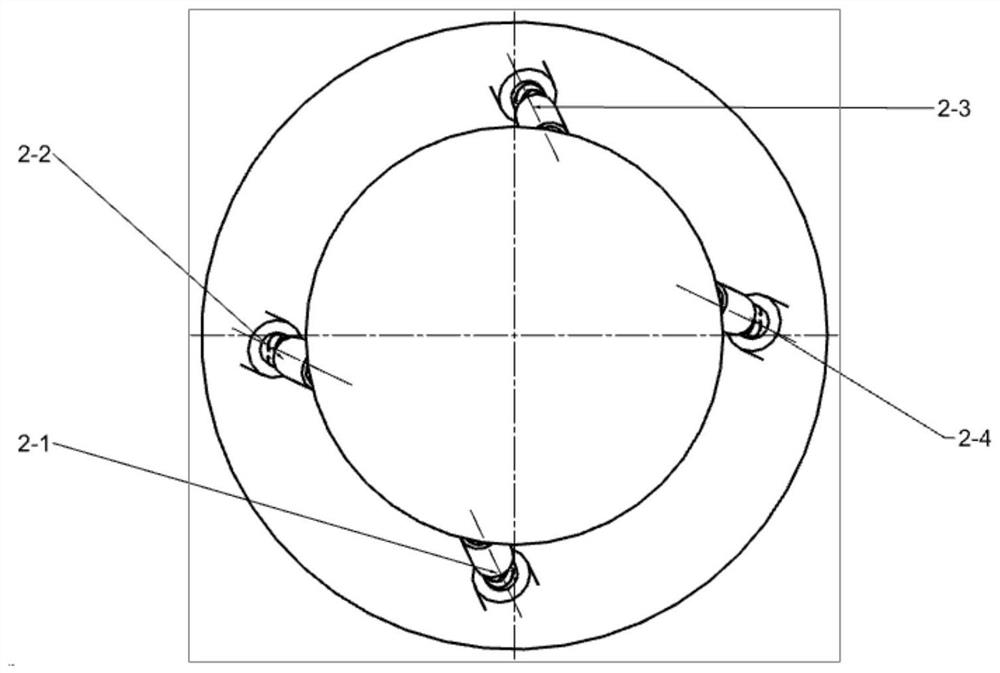
[0029] A multi-degree-of-freedom parallel motion platform driven by a flexible hinge and a piezoelectric inertial actuator includes a static platform 1, four telescopic branch chains 2 corresponding to two pairs, and a dynamic platform 3.
[0030] refer to figure 1 , the static platform 1 and the dynamic platform 3 are connected by a flexible ball pair and a flexible Hooke hinge, and the telescopic branch chain 2 is changed in displacement by a piezoelectric inertial driver.
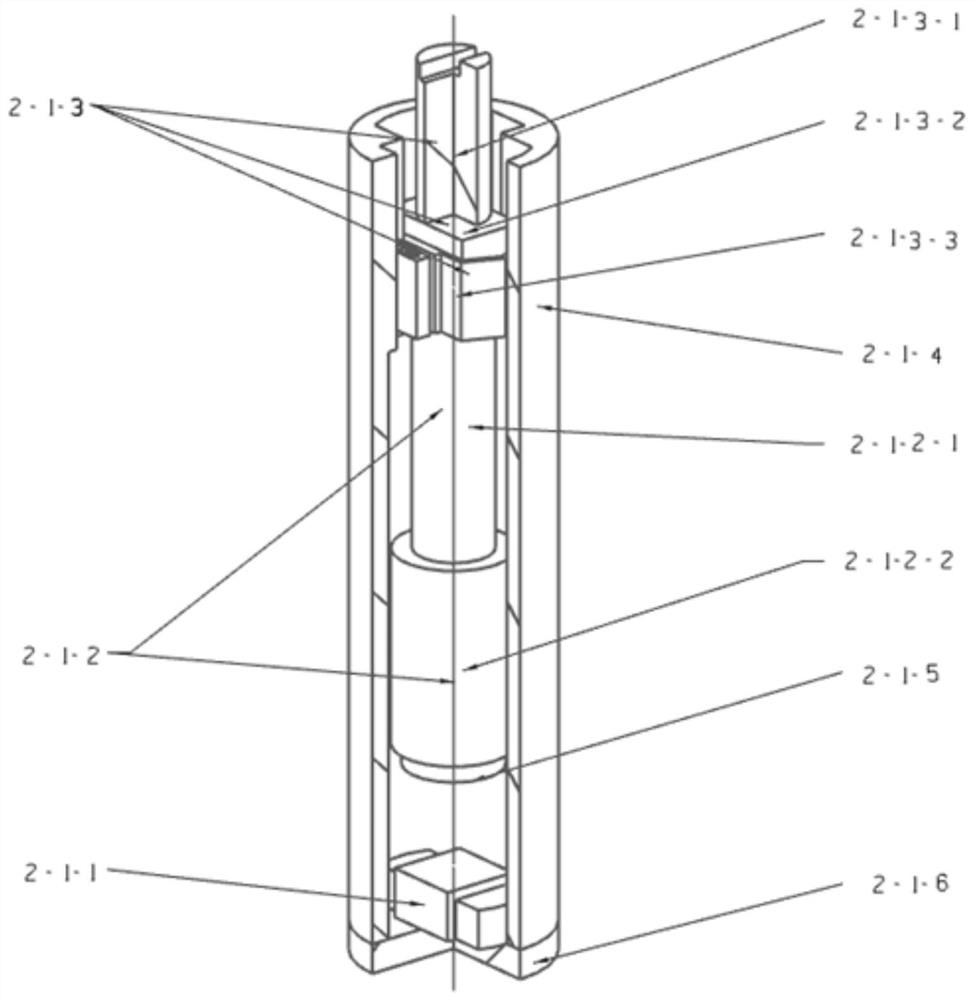
[0031] refer to image 3, the scalable branch chain 2 of the multi-degree-of-freedom motion platform is driven by a linear inertial piezoelectric actuator with a displacement sensing function, and the actuator includes a proportional linear Hall sensor 2-1-1, an actuating body 2- 1-2. Motion unit 2-1-3, cylindrical shell 2-1-4, permanent magnet 2-1-5, base 2-1-6....
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More