

Control method and control system for active steering system of pilotless automobile
An unmanned vehicle, active steering technology, applied in automatic steering control components, electric steering mechanisms, power steering mechanisms, etc., can solve the problems of low control accuracy, large errors, and long adjustment time.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
specific Embodiment
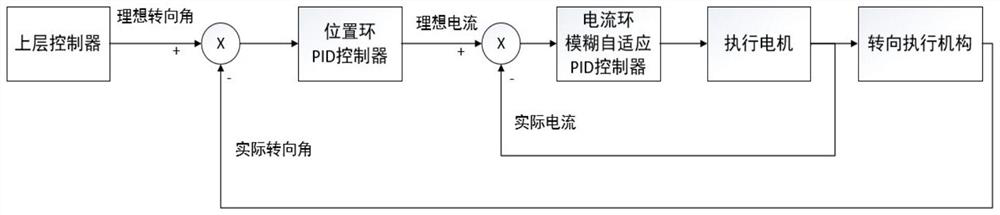
[0045] A specific embodiment of an active steering control method, the method steps comprising:
[0046] Step 1: Determine the target steering angle. After the active steering system is started, the controller at the decision-making level determines the target steering angle θ of the front wheels of the car according to the vehicle status information and environmental information m . The goal of the active steering system is to control the front wheels of the car to the target steering angle and maintain real-time and accurate follow-up.
[0047] Determine the target steering angle θ of the front wheels of the car m The process includes: the on-board camera obtains the surrounding environment information and then inputs the environment information to the upper controller; the sensor obtains the state information generated by the vehicle itself, and transmits its own state information to the upper controller; the upper controller performs vehicle monitoring according to the i...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More