

Unmanned aerial vehicle dynamic obstacle avoidance method based on improved mutual speed obstacle method
A speed obstacle and dynamic obstacle avoidance technology, applied in non-electric variable control, vehicle position/route/height control, instrument and other directions, can solve the problem of large turning angle, reduce the number of turns, reduce jitter, and reduce the turning angle Effect
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0058] Below in conjunction with accompanying drawing, further describe the present invention through embodiment, but do not limit the scope of the present invention in any way.
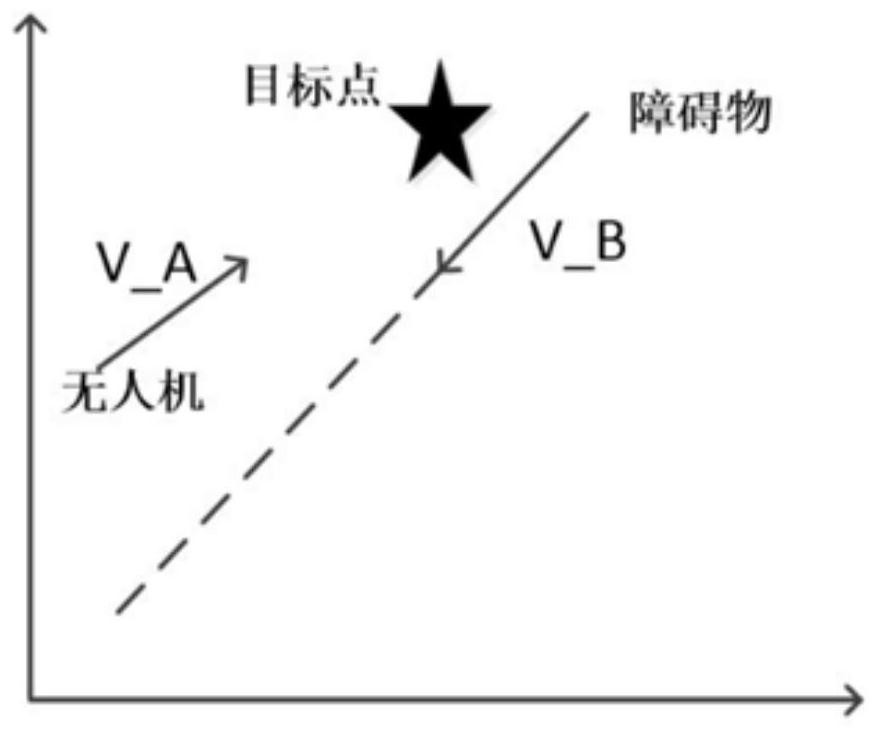
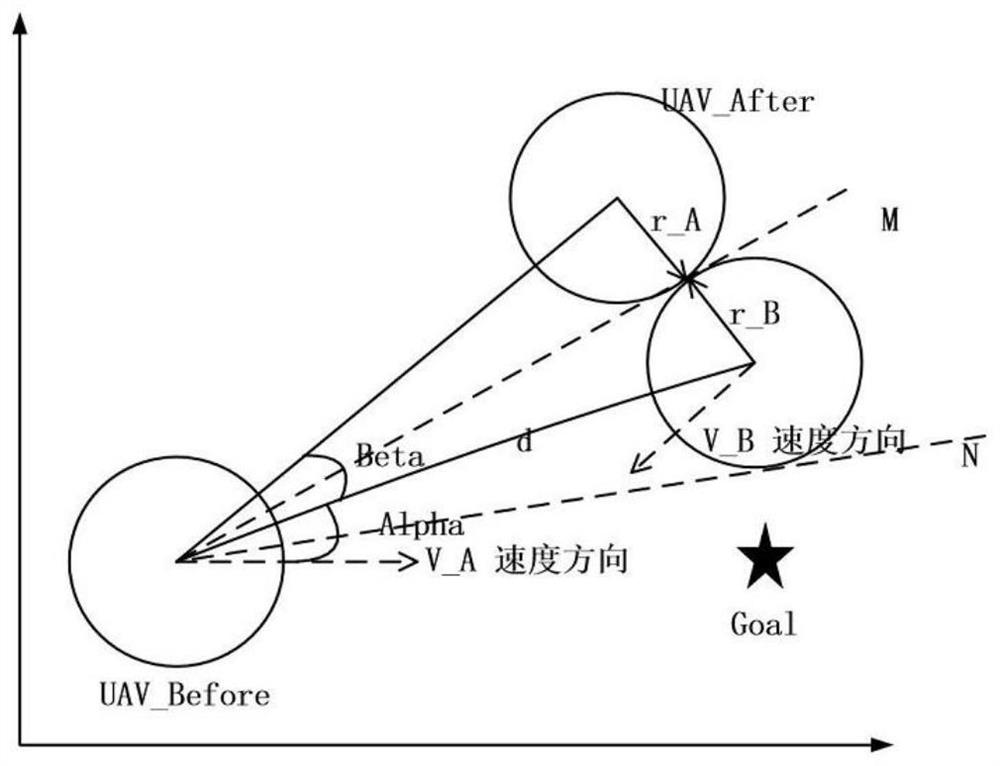
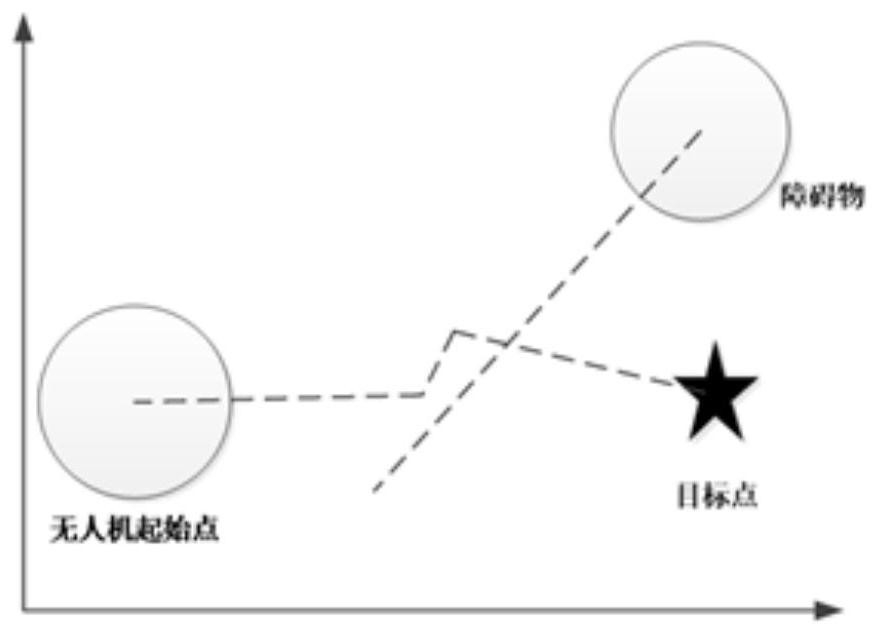
[0059] The invention provides an improved mutual speed obstacle method, which is used to solve the problem that the turning angle of the UAV is too large when flying toward the target point at the speed reselected by the mutual speed obstacle method in the speed space. It is suitable for the problem of dynamic obstacle avoidance of drones, and avoids the problem of multiple maneuvers caused by drones due to excessive turning angles.
[0060] Figure 4 Shown is the flow of the dynamic obstacle avoidance method based on the improved mutual speed obstacle method provided by the present invention. During specific implementation, the inventive method specifically includes the following execution steps:
[0061] 1) Obtain the area size of the task area, the initial coordinates, speed, radius, and velocit...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More