

Medical clamping method and system, medical robot and storage medium
A robotic arm and processor technology, applied in the field of medical devices, can solve problems such as fatigue of assistants, difficulty in persisting, surgical accidents, etc., and achieve the effects of reducing labor costs, high degree of automation, and strong controllability
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
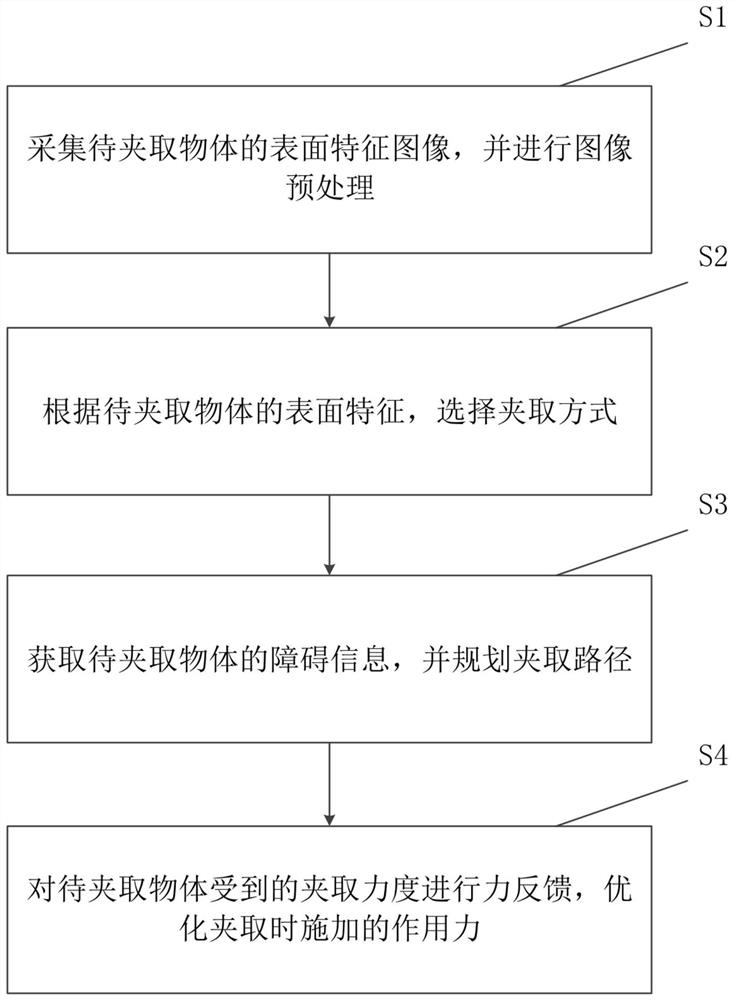
[0030] figure 1 The flow chart of the medical clamping method provided for this embodiment, such as figure 1 Shown, this medical clamping method comprises the steps:
[0031] S1. Collect the surface feature image of the object to be clamped, and perform image preprocessing;
[0032] S2. Select a gripping method according to the surface characteristics of the object to be gripped;
[0033] S3. Obtain obstacle information of the object to be clamped, and plan the clamping path;
[0034] S4. Perform force feedback on the clamping force of the object to be clamped to optimize the force applied during clamping.
[0035] Further, the clipping methods include flexible clipping and rigid clipping. Flexible gripping is suitable for gripping fragile items and preventing damage to items. Rigid gripping is suitable for gripping heavier objects, especially when high precision is required. In other embodiments, a rigid-flexible gripping method may also be used.
[0036] Further, in s...
Embodiment 2
[0041] This embodiment provides a medical clamping system, which can be applied to assist doctors to successfully complete operations during medical treatment. The medical clipping system provided in the embodiment of the present invention can execute the medical clipping method provided in the embodiment of the present invention, and has corresponding functional modules and beneficial effects for executing the method.
[0042] The medical gripping system includes a 3D camera, a robotic arm and a gripping device. The 3D camera is used to collect surface feature images of the object to be gripped; the robotic arm has multiple degrees of freedom; the gripping device is arranged at the end of the robotic arm for gripping Get the object to be gripped. When in use, the surface feature image of the object to be clamped is collected by the 3D camera, the clamping path of the clamping device is controlled by the mechanical arm, and the object to be clamped is clamped by the clamping d...
Embodiment 3
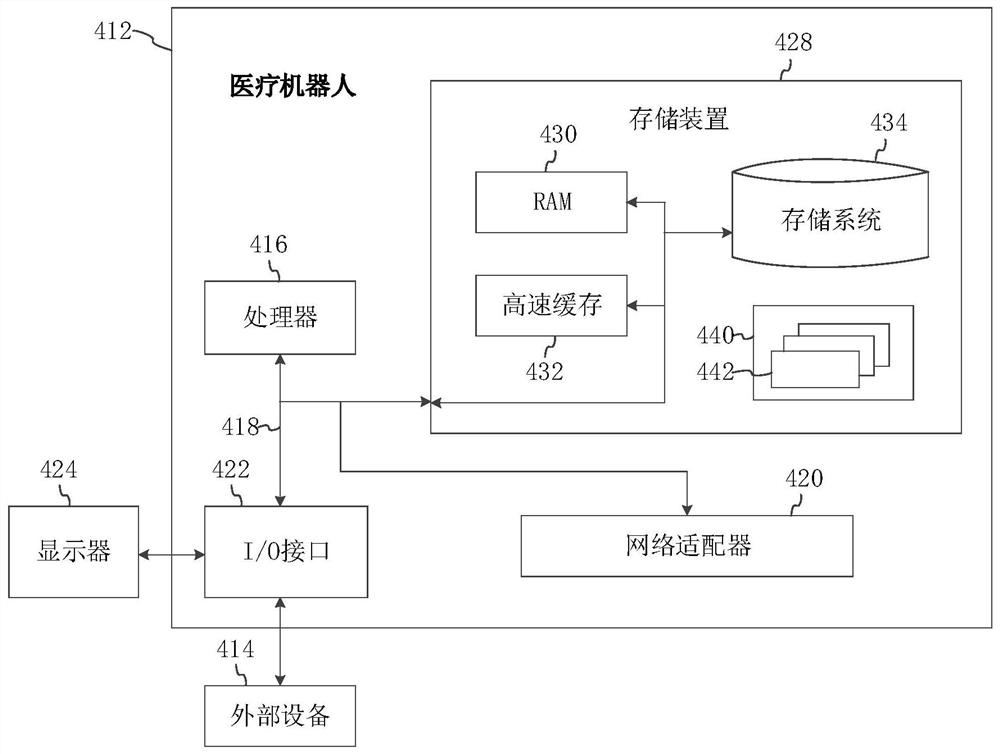
[0047] figure 2 It is a schematic structural diagram of the medical robot in this embodiment. figure 2 A block diagram of an exemplary medical robot 412 suitable for use in implementing embodiments of the invention is shown. figure 2 The shown medical robot 412 is only an example, and should not impose any limitation on the functions and scope of use of the embodiments of the present invention.
[0048] Such as figure 2 As shown, the medical robot 412 is represented in the form of a general-purpose terminal. The components of the medical robot 412 may include, but are not limited to: a medical robot body (not shown), one or more processors 416, a storage device 428, and a bus connecting different system components (including the storage device 428 and the processor 416) 418.
[0049] Bus 418 represents one or more of several types of bus structures, including a storage device bus or controller, a peripheral bus, an accelerated graphics port, a processor, or a local bus...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More