

A motion data processing method of a rope-driven serpentine manipulator with a rope-hole gap
A processing method and technology of motion data, applied in manipulators, program-controlled manipulators, manufacturing tools, etc., can solve the problems of large influence of attitude positioning accuracy, difficulty in overall consideration, infinite loop at extreme points, etc., to achieve improved control accuracy, The effect of improving control accuracy and robustness
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
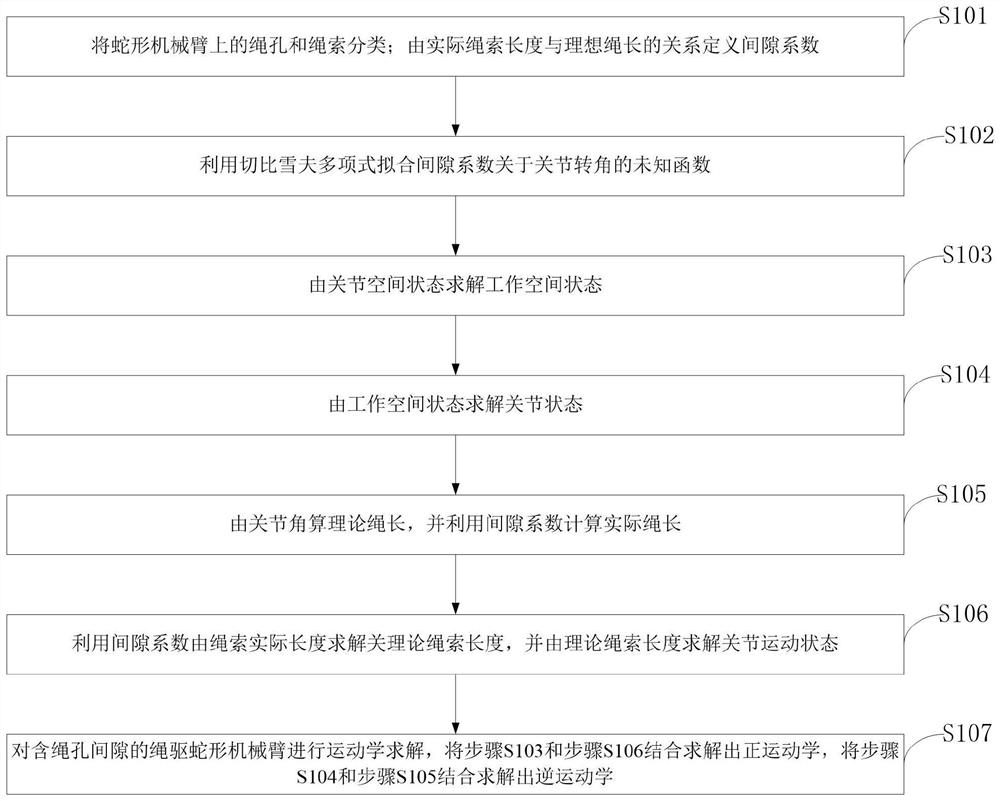
[0142] The method for processing motion data of a rope-driven serpentine robotic arm with a gap between rope holes provided by an embodiment of the present invention specifically includes the following steps:
[0143] Step 1: Classify the rope holes and ropes on the snake-shaped manipulator; define the gap coefficient by the relationship between the actual rope length and the ideal rope length.
[0144] Step 2: Fit the gap coefficient c using Chebyshev polynomials i k about 2i ,q 2i-1 unknown function of .
[0145] Step 3: Solve the workspace state from the joint space state.
[0146] Step 4: Solve the joint state from the workspace state.
[0147] Step 5: Calculate the theoretical rope length from the joint angle, and use the gap coefficient to calculate the actual rope length.
[0148] Step 6: Solve the theoretical rope length from the actual rope length by using the gap coefficient, and solve the joint motion state from the theoretical rope length.
[0149] Step 7: S...
Embodiment 2
[0233] combine Figure 7 This embodiment is described. The difference between this embodiment and the specific embodiment is that the kinematics calculation is performed on the rope-driven serpentine manipulator with the gap between the rope holes, and the forward kinematics is obtained by combining steps three and six. Step 4 and step 5 solve the inverse kinematics.
[0234] The other steps are the same as those in Embodiments 1, 2, 3, 4, 5, 6, and 7.
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More