

A binocular measurement system, method and device for obtaining the size of automobile parts
A technology for auto parts and measurement systems, which is applied in image analysis, image enhancement, instruments, etc., can solve the problems of complex size measurement steps, large measurement errors, and small shooting range of auto parts, and achieves easy measurement of geometric information and high practicability. , the effect of improving the accuracy
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
specific Embodiment approach 1
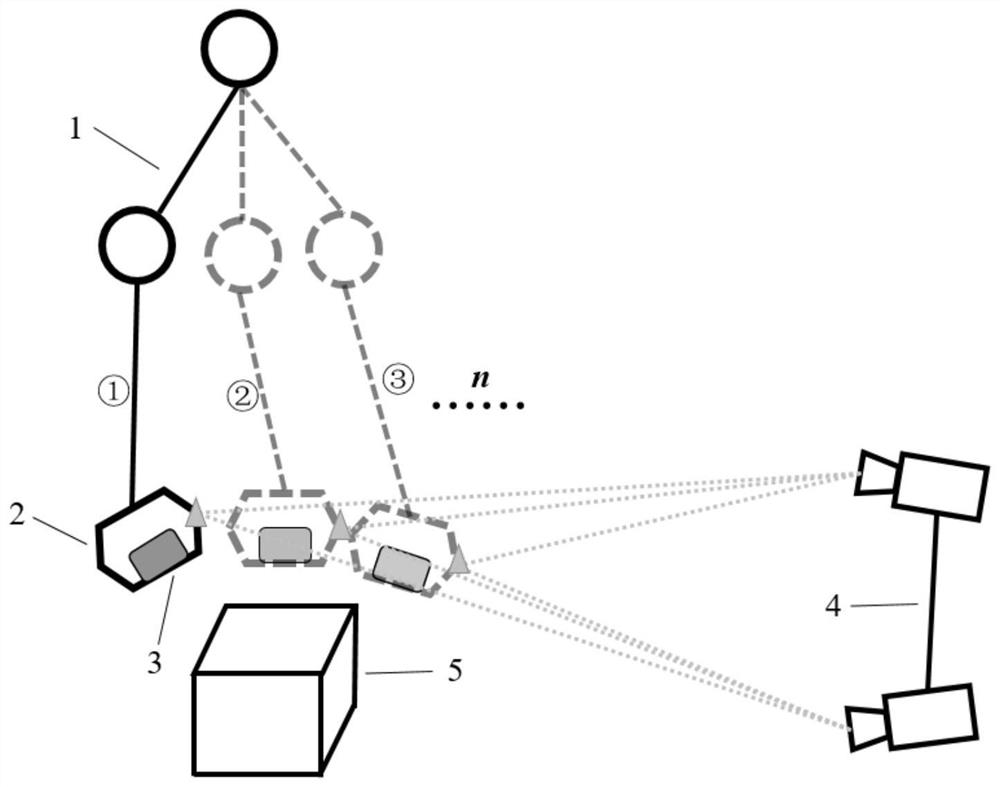
[0023] DETAILED DESCRIPTION OF THE PREFERRED EMBODIMENT 1. A binocular measurement system for obtaining the size of automobile parts described in this embodiment, the system includes: a mechanical arm 1, a three-dimensional calibration target 2, a 3D sensor 3, a binocular camera 4, a measured Auto parts5 and computers, of which:
[0024] The three-dimensional calibration target 2 is fixed on the end of the mechanical arm 1 together with the 3D sensor 3, and the binocular camera 4 is fixed on the side of the mechanical arm 1 for taking images of the three-dimensional calibration target 2 and sending the captured images to to the computer;
[0025] The 3D sensor 3 is used to collect point cloud information on the surface of the measured automobile part 5, and the collected point cloud information is sent to a computer;
[0026] The computer is used to process the captured images to obtain the conversion matrix from the stereo calibration target 2 to the binocular camera 4, and ...
specific Embodiment approach 2
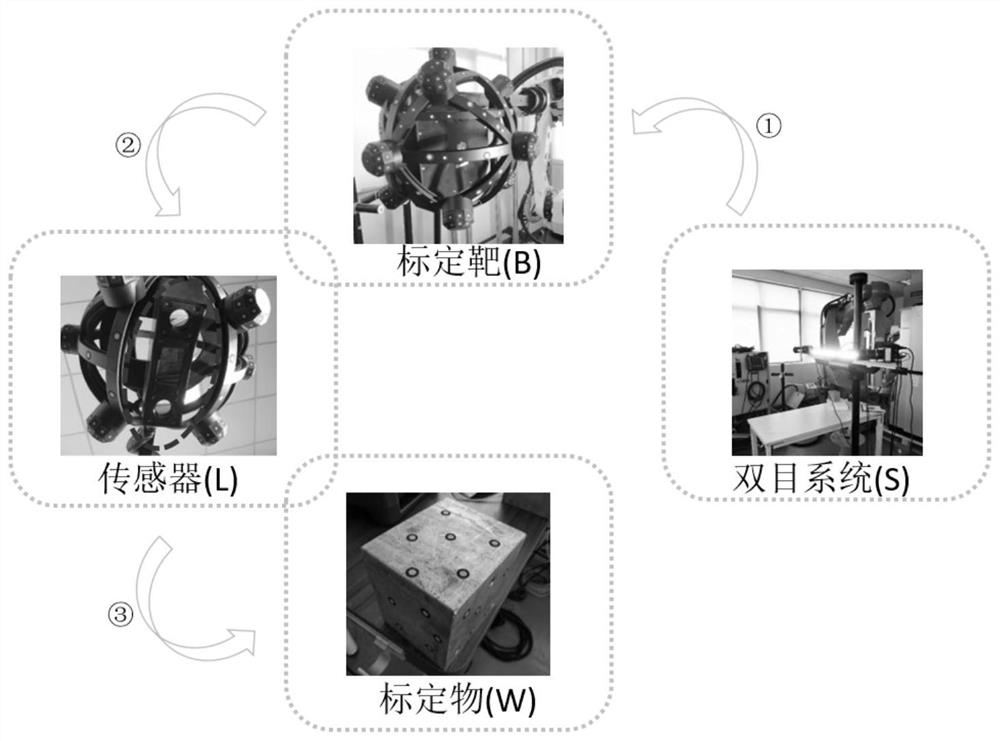
[0027] Embodiment 2. The difference between this embodiment and Embodiment 1 is that the conversion of the point cloud information collected by the 3D sensor 3 into the binocular camera coordinate system also requires the use of the transformation matrix from the 3D sensor 3 to the stereo calibration target 2. , the conversion matrix from the 3D sensor 3 to the stereo calibration target 2 is obtained by calibrating the stereo calibration target 2 and the 3D sensor 3 .
specific Embodiment approach 3
[0028] Specific embodiment three, based on the binocular measurement method of a binocular measurement system for obtaining the size of automobile parts described in specific embodiment one, the method is specifically implemented through the following steps:
[0029] Calibrate the stereo calibration target 2 and the 3D sensor 3, and obtain a conversion matrix from the 3D sensor 3 to the stereo calibration target 2 according to the calibration;
[0030] The computer processes the image of the stereo calibration target 2 taken by the binocular camera 4 to obtain a conversion matrix from the stereo calibration target 2 to the binocular camera 4;
[0031] After the 3D sensor 3 collects the point cloud information on the surface of the measured automobile part 5, according to the obtained transformation matrix from the 3D sensor 3 to the stereo calibration target 2 and from the stereo calibration target 2 to the binocular camera 4, the 3D sensor 3 collects The point cloud informati...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More