

An energy-saving underwater robot detection method and system based on slam architecture
A technology for underwater robots and detection methods, applied in control/adjustment systems, instruments, measuring devices, etc., can solve the problems of short navigation time of robots and insufficient smoothness of cruise curves, achieve finer and more effective scanning and composition, and reduce return to the base station The number of times, the effect of increasing carbon sink capacity
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0037] The present invention will be described in further detail below in conjunction with the accompanying drawings.
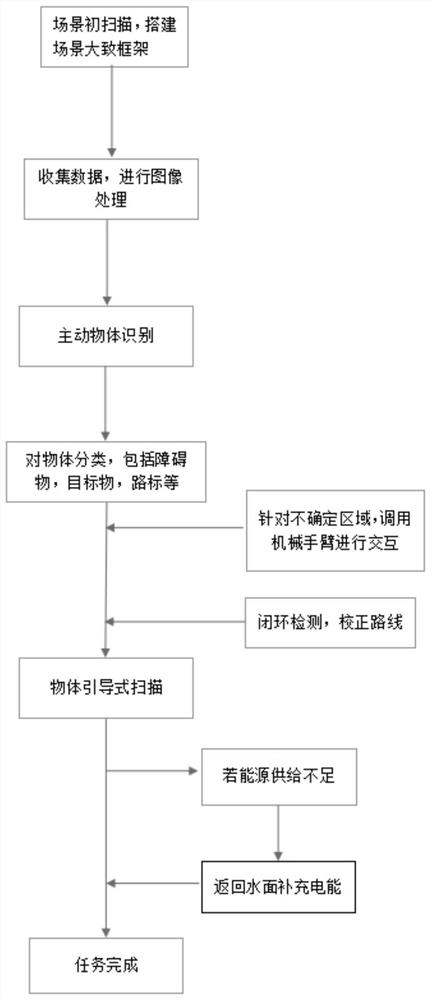
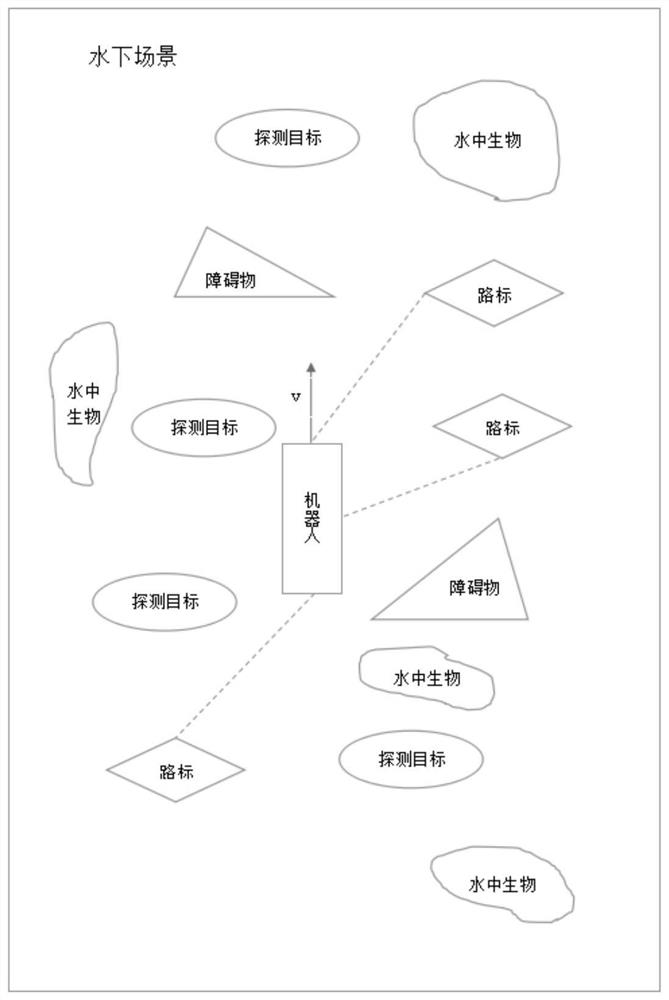
[0038]The present invention provides an energy-saving underwater robot detection method based on the SLAM architecture, which performs active identification and detection on objects for positioning and composition in special underwater environments, and then calculates a reasonable cruising route and self-energy supply, such as figure 1 As shown, it specifically includes the following steps:
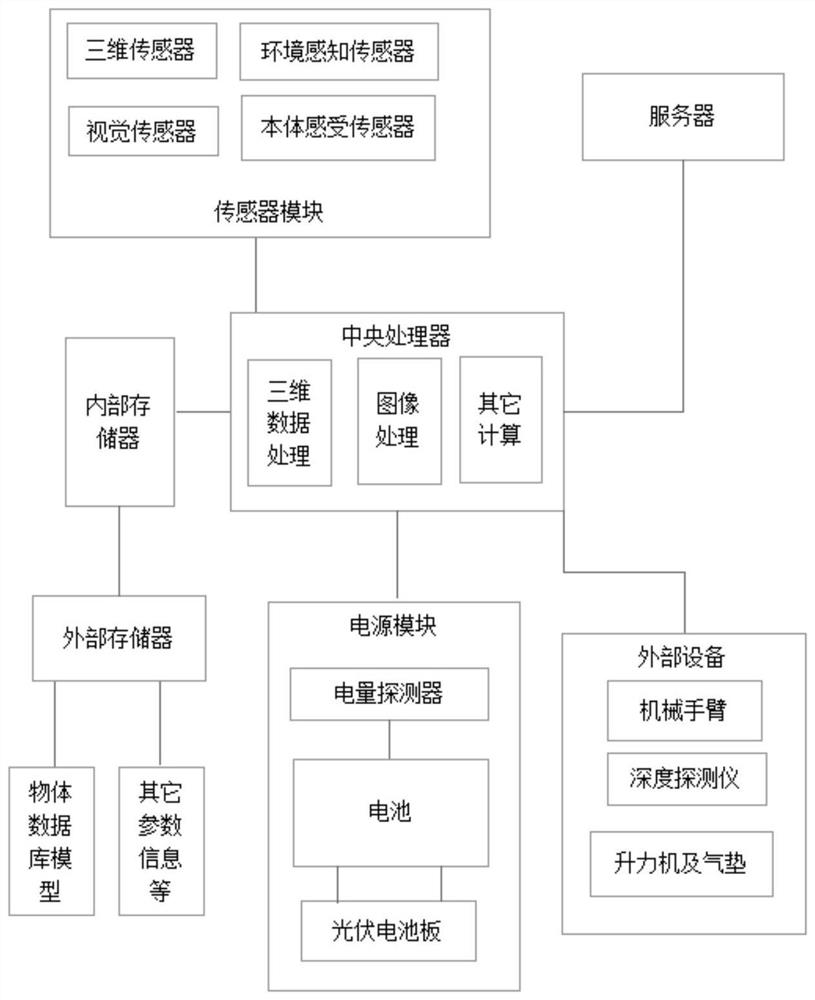
[0039] Step 1: While the underwater robot uses the attitude sensor to obtain its own positioning, it collects 3D data in the scene and constructs the scene.
[0040] The visual sensor of the underwater robot is used to detect the environment, and the perceived real-time picture is transmitted to the central processing unit. The processor uses the imported real-time data to initially construct the three-dimensional scene. The constructed 3D scene is projected, constrain...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More