

Target pose estimation method and system based on attention mechanism and Hough voting
A technology of pose estimation and attention, applied in computing, computer components, character and pattern recognition, etc., can solve problems such as poor robustness, easily affected by background or occlusion, cumbersome process, etc., to speed up network convergence and improve Effects on Presentation and Reasoning Abilities
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0059] In order to make the technical problems, technical solutions and advantages to be solved by the present invention clearer, the following will be described in detail in conjunction with the accompanying drawings and specific embodiments:
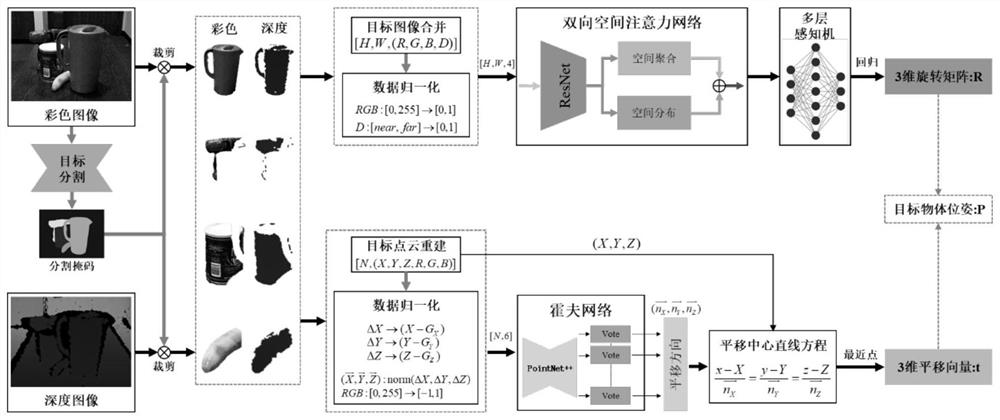
[0060] Aiming at the problems of existing object pose estimation methods, the present invention provides a target pose estimation method based on attention mechanism and Hough voting. The specific network structure is as follows figure 1 shown, including the following steps:
[0061] Step S1: Obtain the color and depth image of the scene containing the target object;
[0062] Step S2: Obtain the category and segmentation mask of each object from the color image through the existing state-of-the-art object segmentation method;
[0063] Step S3: Use the object segmentation masks obtained in step S2 to cut out the color and depth images of the corresponding objects from the input image, and perform channel splicing to obtain 4-channel im...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More