

Parallel type color ultrasound operation robot end effector
An end effector, robot technology, applied in the medical field, can solve problems such as inconvenience, robot manipulator is too large, patient safety threat, etc.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
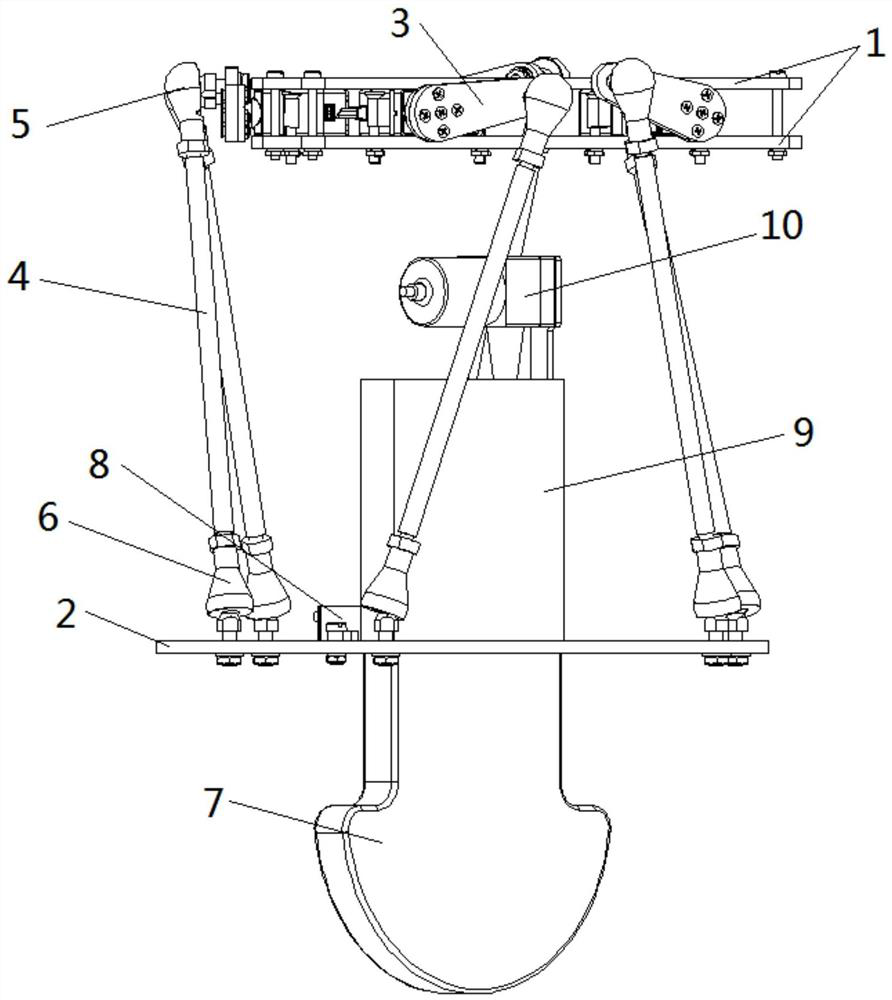
[0038] According to the indication Figure 1-5 , in the initial state, the fixed platform 1 is connected to the end of the mechanical arm, and the fixed platform 1 and the support plate of the mechanical arm are assembled by bolts. Drive, smaller size, lower cost, easier to control, according to the calculation, this program plans to use RC30P steering gear, each weighing about 60g, the use of steering gear greatly reduces the overall body size and The weight, which reduces the burden on the hardware and control of the steering arm 3) is fixed between the edges of the interlayer of the fixed platform 1. The steering gear is the drive input of the end effector, and the electrical signal sent by the host computer drives the steering gear to output a corresponding rotation. Angle, the output shaft of each steering gear has a steering gear toothed plate, the output end of the steering gear is fixedly installed with the steering gear arm 3 through the steering gear toothed plate, a...
Embodiment 2
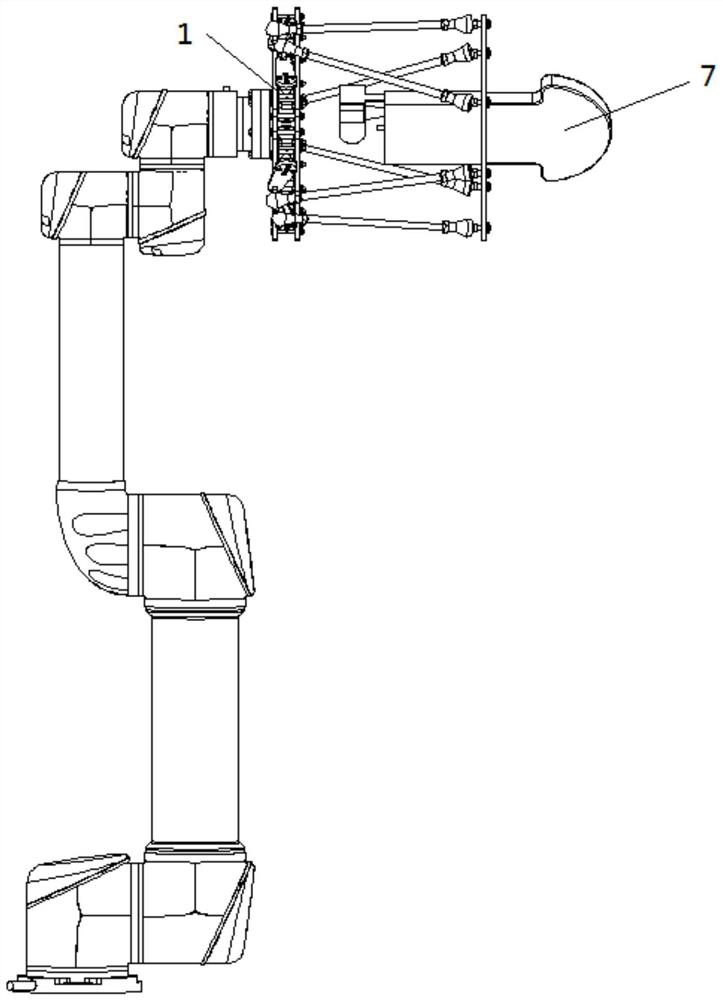
[0040] According to the indication Image 6 , the fixed platform 1 is the connector that fixes the entire end effector at the end of the robot arm. The principle of lightweight design is considered as a whole, and this application scenario is light-loaded. Therefore, it is recommended to use aluminum alloy materials. The threaded holes around the fixed platform 1 use To fix the steering gear support plate, the large circular opening in the middle is used to connect the connector at the end of the mechanical arm;
Embodiment 3
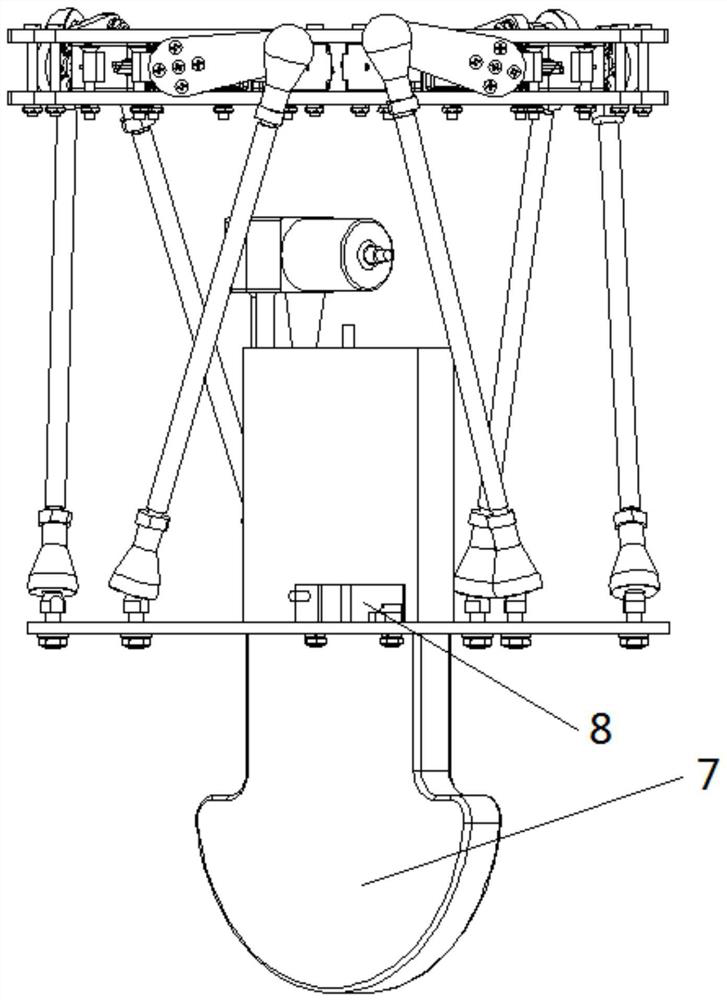
[0042] According to the indication Figure 7 , the moving platform 2 is used to connect the color ultrasound probe 7, and is connected with the lower ball joint 6 (straight rod type ball end joint ball joint) at the lower end of the connecting column 4 on the mechanism. Platform 1, but it will also be affected by the dynamic load from color ultrasound probe 7 during diagnosis. According to calculation and analysis, the maximum dynamic load is 8.01N and the lateral force is 4.25N;
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More