

Method for preoperative screening of position where nerve stimulator is implanted into skull and system thereof
A technology of nerve stimulation and implantation, applied in surgical navigation systems, surgery, instruments, etc., can solve problems such as affecting wound healing, prolonging operation time, and sutured skin tension, so as to solve difficulties and complications, and reduce surgery. time, the effect of reducing side effects
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image


Examples
Embodiment Construction
[0034] The present invention will be further described below in conjunction with the accompanying drawings and specific embodiments, so that those skilled in the art can better understand the present invention and implement it, but the examples given are not intended to limit the present invention.
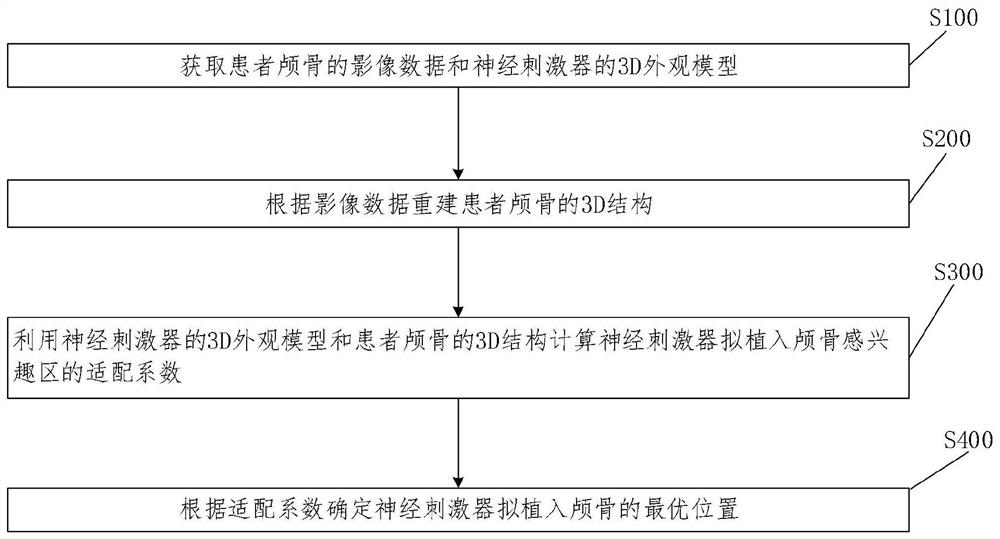
[0035] In order to better understand a method and system for preoperatively screening the position of a neurostimulator implanted in the skull disclosed in the embodiment of the present invention, the present invention provides figure 1 Schematic flow diagram of the method for preoperative screening of the placement of neurostimulators in the skull is shown.
[0036] see figure 1 As shown, the embodiment of the present invention is a method for preoperatively screening the implantation position of the neurostimulator in the skull, the method comprising the following steps:
[0037] Step 100: Obtain image data of the patient's skull and a 3D appearance model of the neurostimulator...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More