

Storage robot
A robot and warehousing technology, applied in the field of robots, can solve problems such as the identification of goods that cannot be placed by robots, and the inability to automatically clean up dust or small debris, and achieve the effect of reducing labor intensity.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
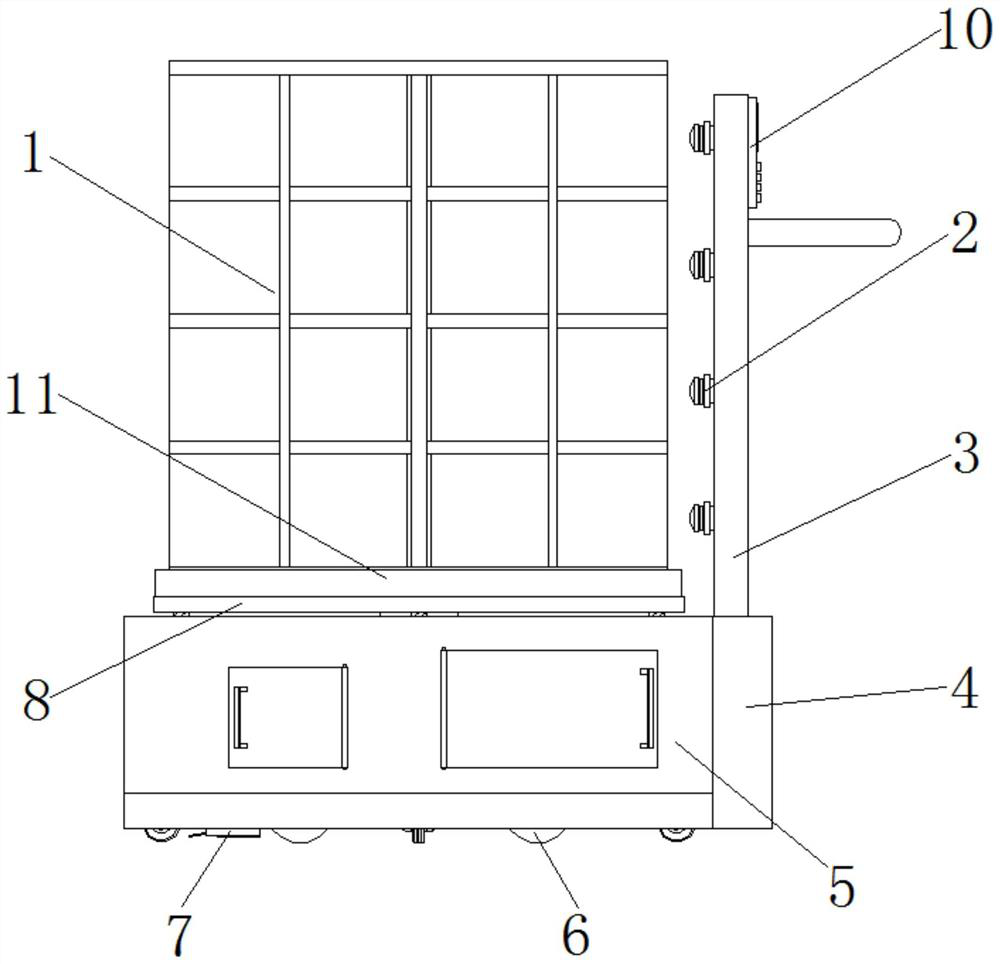
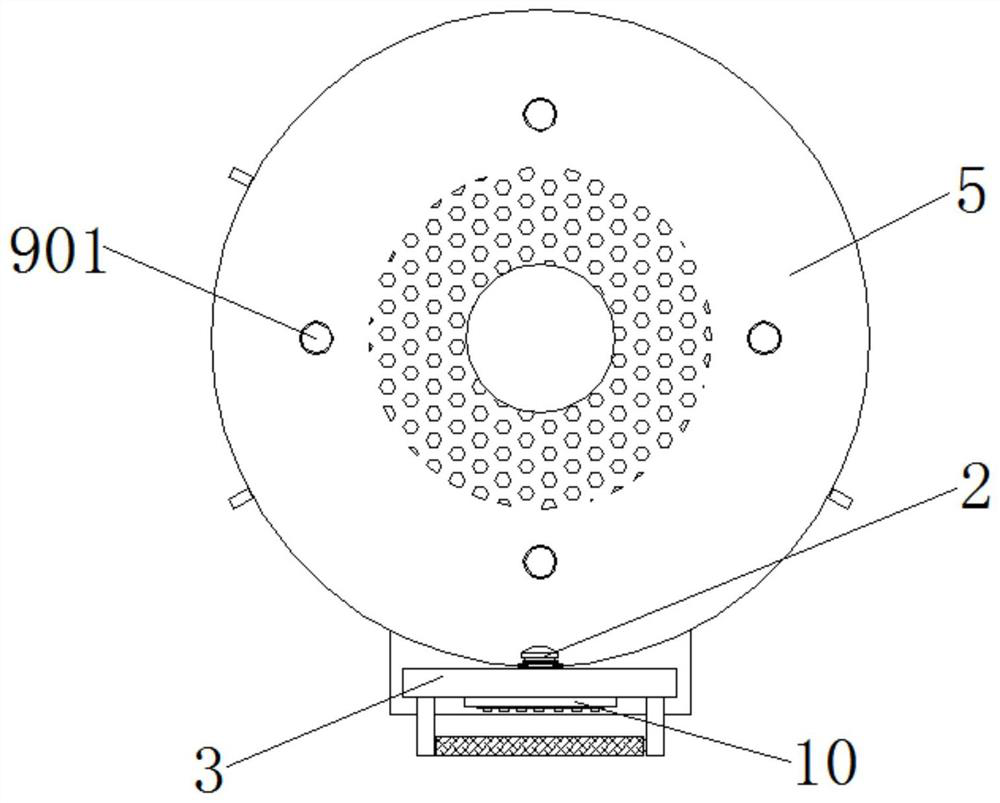
[0039] Example 1, such as figure 1 , 2 As shown in and 6, before the goods are transported, the placement personnel manually place the goods one by one in the storage compartment inside the storage box 1, and make the identification code of the goods face the outside of the storage compartment. Every time the goods are placed, the single chip microcomputer 13 Control the first servo motor 12 to drive the storage box 1 to rotate 45° until each storage box is full of goods. After each rotation of the storage box 1 stops, there will be a row of storage boxes facing the code scanner 2 directly opposite, and the four The group code scanner 2 will identify the identification codes on the goods in the column of storage bins, and record the storage bin positions where the goods with corresponding identification codes are located.
Embodiment 2
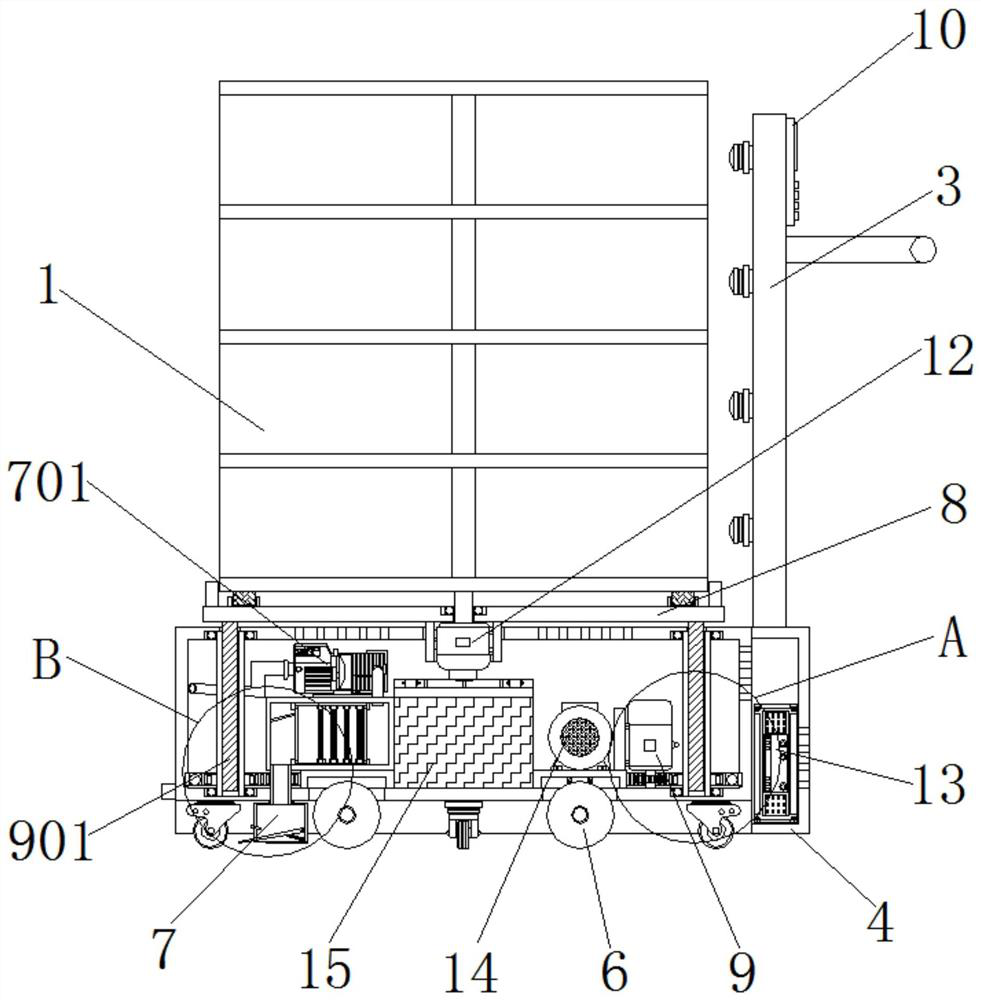
[0040] Example 2, such as figure 1 , 2 , 3, 4, 5 and 7, the control panel 10 controls the driving device 14 to drive the driving wheel device 6 to rotate, and the driving wheel device 6 is used to push the entire storage robot to move until the storage robot moves to the designated cargo rack , during the process, if there is a lot of dust or small debris on the road where the storage robot passes, the control panel 10 controls the air pump 701 to start working. The blow guide plate 707 rotates downwards, so that the side of the guide plate 707 away from the mounting plate 3 is attached to the ground, so that small debris can better enter the inside of the bar-shaped warehouse 709, and these air carry dust and small debris. The material enters the inside of the filter chamber 702, and after being filtered by multiple sets of filter screens 703, it is ejected from the arc-shaped conduit at the output end of the air pump 701, and the ejected air flows upwards spirally against t...
Embodiment 3
[0041] Example 3, such as Figure 1-7 As shown, when the goods on the storage robot need to be placed on the shelf according to the category, the placement personnel selects a category of goods through the control panel 10, and the control panel 10 transmits the information to the single-chip microcomputer 13, and the single-chip microcomputer 13 according to the previous Scan the code to record the position of the goods, control the first servo motor 12 to drive the storage box 1 to rotate, and turn the position of the corresponding goods in each layer of the warehouse to face the placement personnel one by one, and if the goods are located at the inner bottom of the storage box 1, in the When the first servo motor 12 drives the storage box 1 to rotate, the single-chip microcomputer 13 controls the second servo motor 904 to drive the driving gear 908, the inner ring rack 905 and the connecting gear 906 to rotate in turn, and the four sets of connecting gears 906 respectively d...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More