

Soft mechanical gripper and control method thereof
A mechanical gripper and soft technology, applied in the direction of manipulators, manufacturing tools, chucks, etc., can solve the problems of slow response speed, difficult maintenance, small gripper range of motion, etc., achieve good thermal and electrical conductivity, improve energy density, The effect of increasing the recovery speed
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0027] The technical solution of the present invention will be further described below in conjunction with the accompanying drawings.
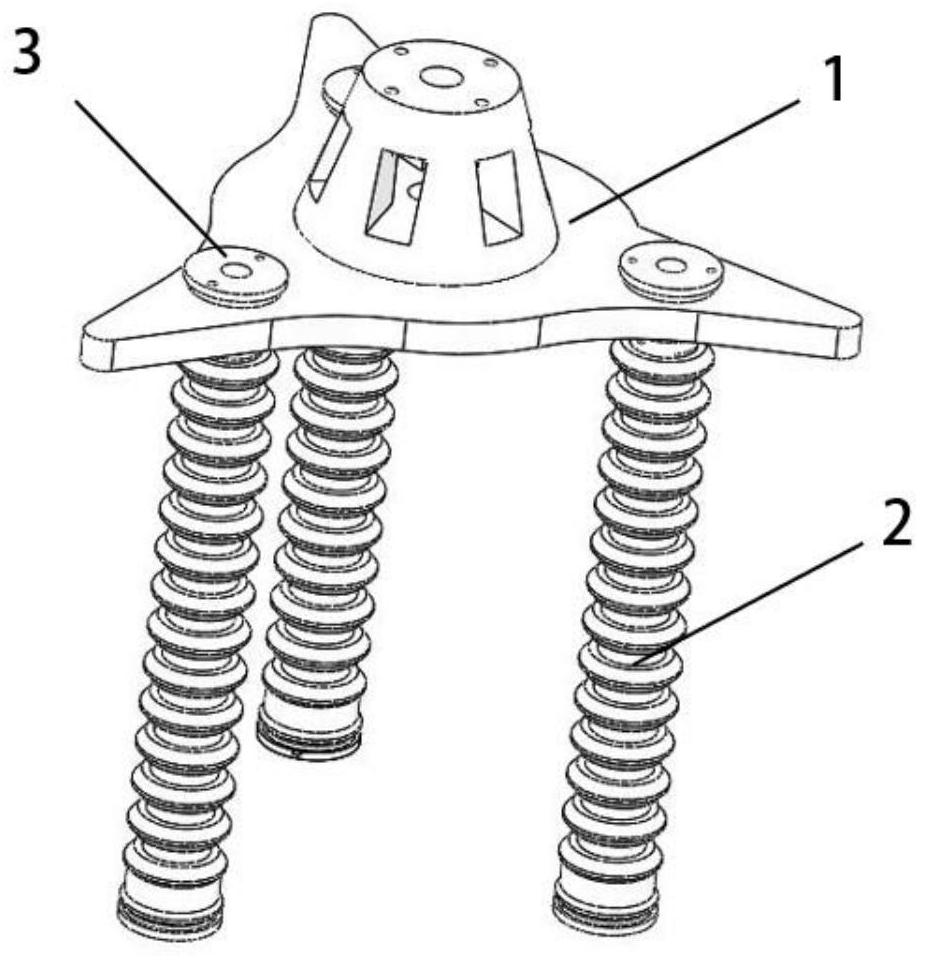
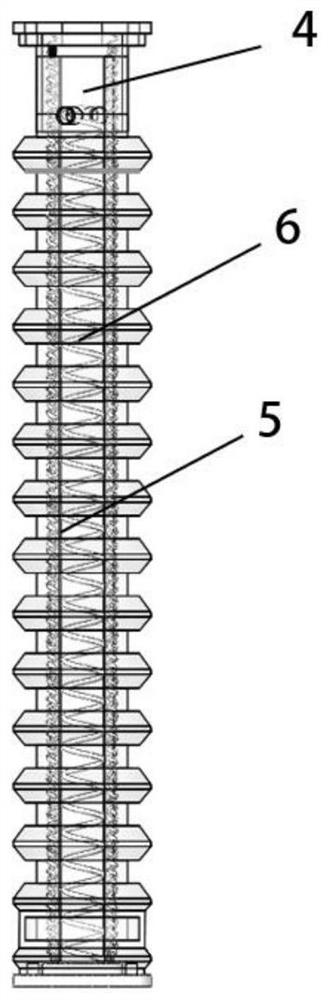
[0028] Such as figure 1 with figure 2 As shown, a soft gripper of the present invention includes a gripper assembly 1 , a soft single finger 2 , an end cap 3 , a single finger connector 4 , a composite artificial muscle 5 and a spring 6 .
[0029] The material of gripper assembly, end cap and single-finger connection is made of PLA, which is prepared by 3D printing; the software single finger is prepared by mixing Ecoflex00-20A and Ecoflex00-20B at a ratio of 1:10 and placing it in a 3D-printed mold. become.
[0030] Nylon 66 fiber preparation: PA6,6 particles were dissolved in formic acid solution, a 15% spinning solution was prepared, ultrasonic crushing was carried out at 50 degrees Celsius for 30 minutes, and PA6,6 fibers were prepared using an electrospinning machine. The specific parameters are as follows. The model of MECC nano elec...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More