

A system and method for onboard vision intelligent processing of unmanned aerial vehicles
A technology of visual intelligence and processing methods, which is applied in the field of drones, can solve problems affecting system timeliness, poor stability, and target loss, and achieve the effects of reducing over-rotation, clear images, and reduced lens shake
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image


Examples
Embodiment 1
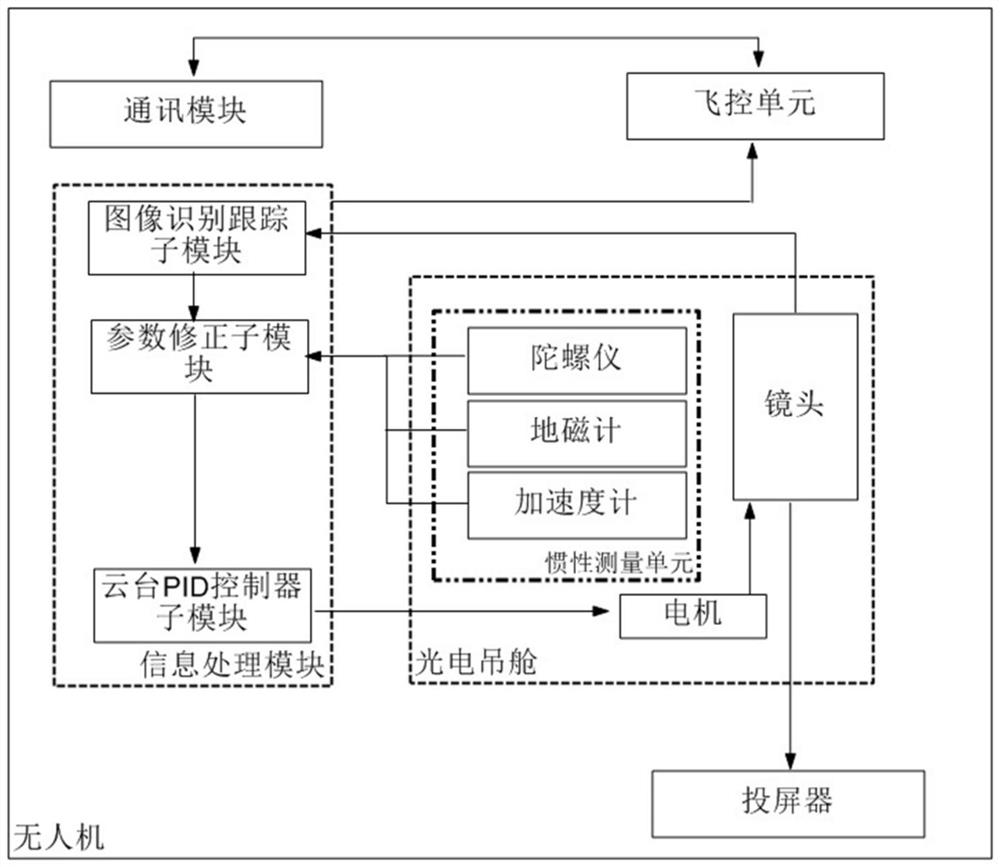
[0111] Carry out a simulation experiment, using a UAV equipped with a photoelectric pod, an information processing module and a screen projector to track a moving target. The photoelectric pod is a two-degree-of-freedom photoelectric pod, and the lens adopts a visible light lens. The information processing module includes an image recognition tracking submodule, a pan / tilt PID controller submodule, and a parameter correction submodule.
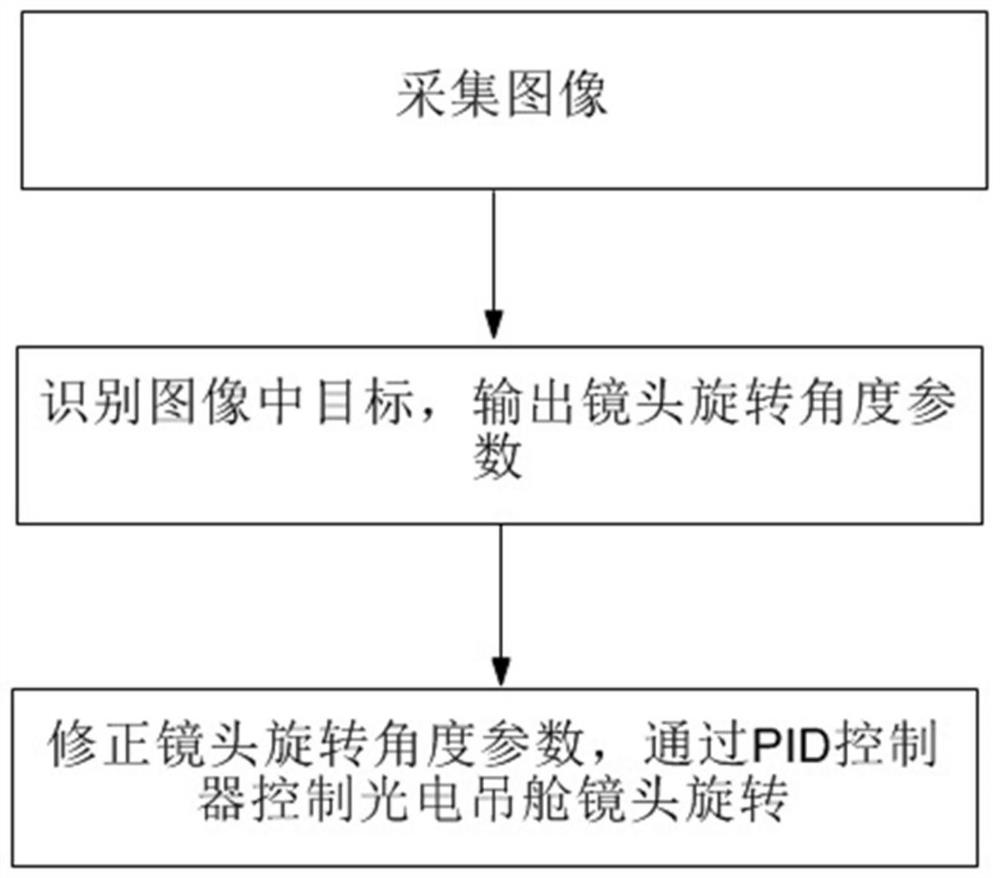
[0112] In step S1, the unmanned aerial vehicle takes an image through the photoelectric pod;
[0113] In step S2, the image is recognized by the image recognition and tracking sub-module, and the rotation angle rate parameter of the photoelectric pod lens is calculated when the target is moved to the middle position of the image;
[0114] In step S3, the information detected by the inertial measurement unit and the lens rotation angular rate parameter are fused through the parameter correction sub-module to realize the correction of the lens r...
experiment example 1
[0139] In record embodiment 1 and comparative example 1, the target recognition success rate within 10 minutes after the UAV discovers the target, the target recognition rate refers to the number of images with the target identified by the image recognition tracking sub-module and the photoelectric pod Pass the ratio of the total number of images.
[0140] The results are shown in Table 1:
[0141] Table I
[0142]
[0143] It can be seen from Table 1 that the proportion of successfully recognized targets in Example 1 is significantly higher than that in Comparative Example 1, which indicates that the lens rotation stability of the photoelectric pod is improved by correcting the lens rotation angular rate parameters, and the lens shake is greatly reduced. The image is clearer, and it is easier for the image recognition and tracking sub-module to identify the target therein.
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More