

A relative pose estimation method for non-cooperative targets in space based on upf
A non-cooperative target and relative pose technology, which is applied in the field of relative pose estimation of non-cooperative targets in space based on unscented particle filter UPF, can solve problems such as unfavorable practical applications and filter performance degradation, and achieves fast calculation speed and computational complexity. Small, good invariant effect
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0089] In order to make the objectives, technical solutions and advantages of the present invention clearer, the present invention will be described in detail below with reference to the accompanying drawings and specific embodiments.
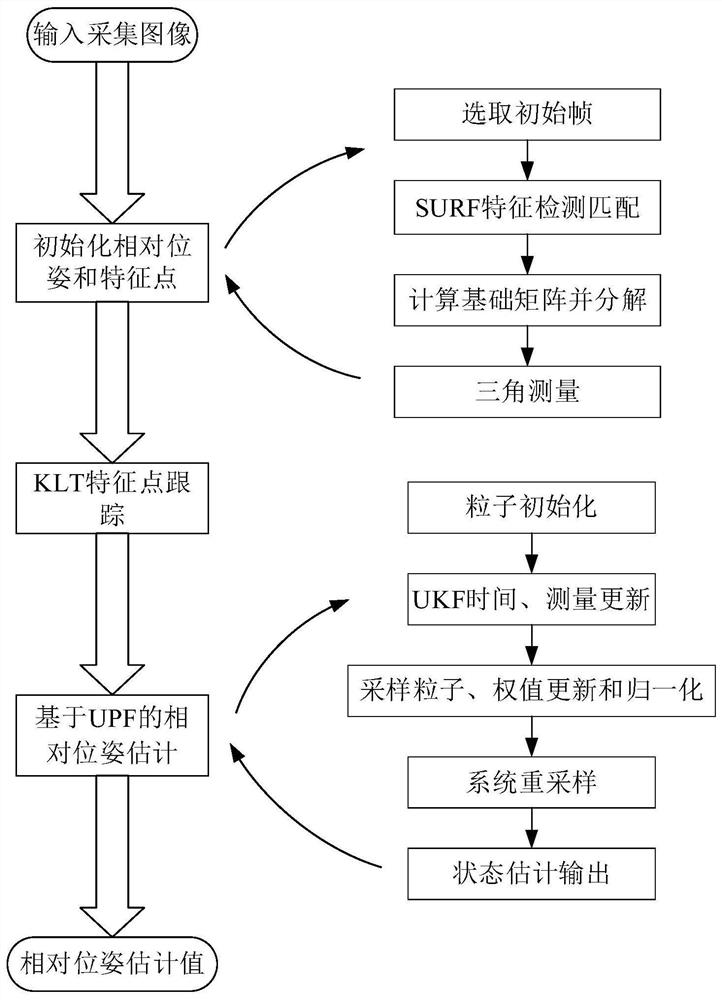
[0090] Aiming at the problems existing in the method for estimating the relative pose of a non-cooperative target with unknown models in the background art, the present invention provides a UPF-based method for estimating the relative pose of a non-cooperative target in space. The frame uses SURF (Speeded Up Robust Features, referred to as SURF) feature point matching, the calculation and decomposition of the essential matrix, and the triangulation method to calculate the initial value of the relative pose between the camera and the target and the three-dimensional SURF feature point in the target body coordinate system. The initial value of the coordinates is combined with feature detection and KLT (Kanade-Lucas-Tomasi, KLT) algorithm to track ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More