

Instrument driving device, instrument end assembly, surgical instrument and surgical robot
A technology for driving devices and transmission components, which is applied in the field of device driving devices, device terminal components, surgical instruments and surgical robots, and can solve problems such as limited number of degrees of freedom, large space occupation, and complex transmission structure
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
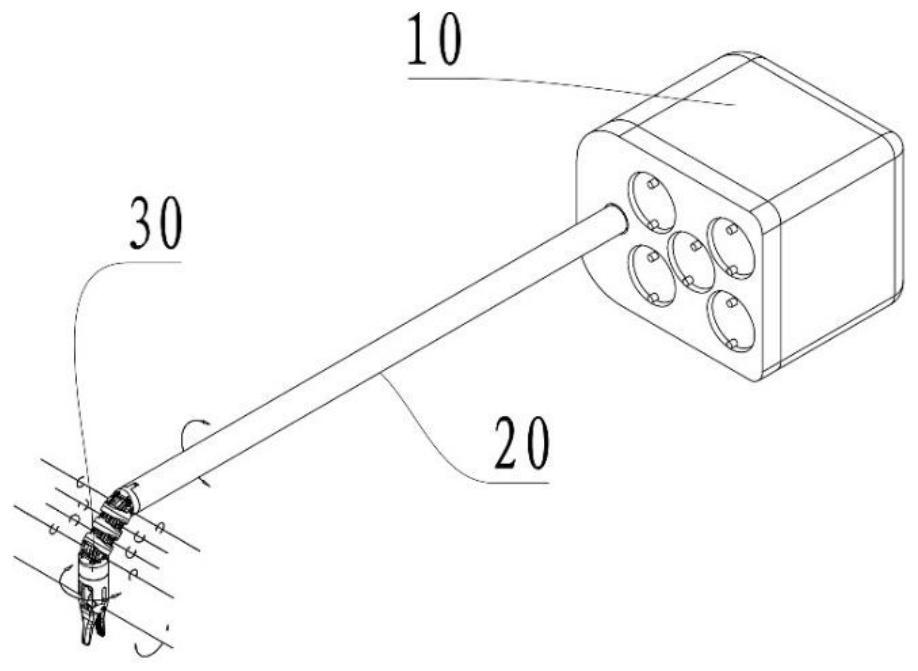
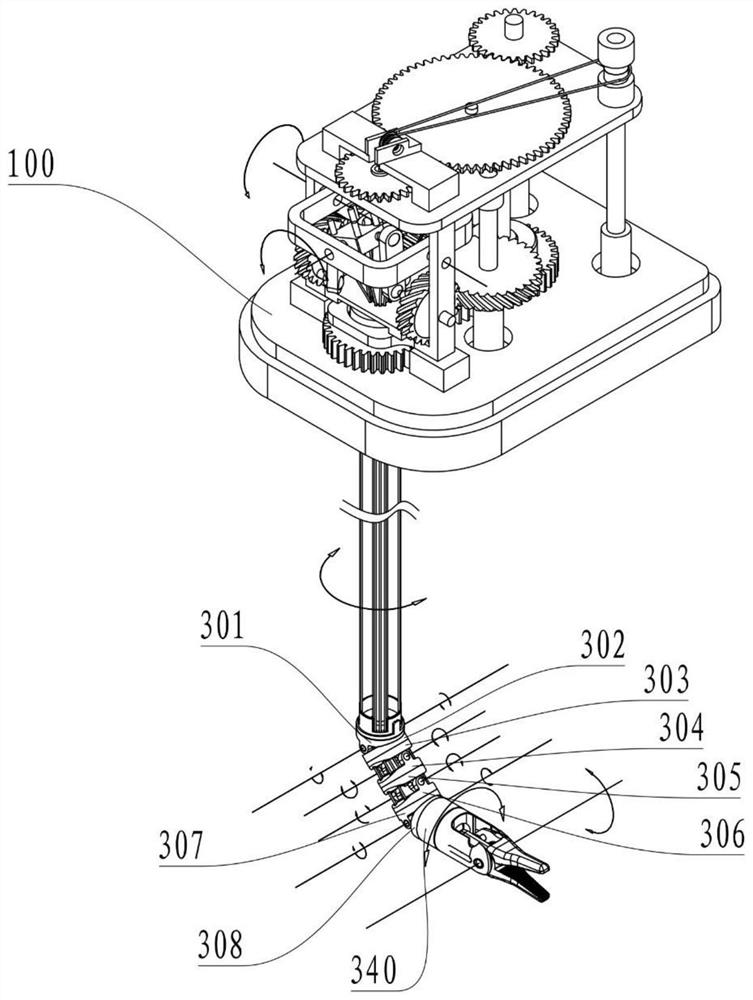
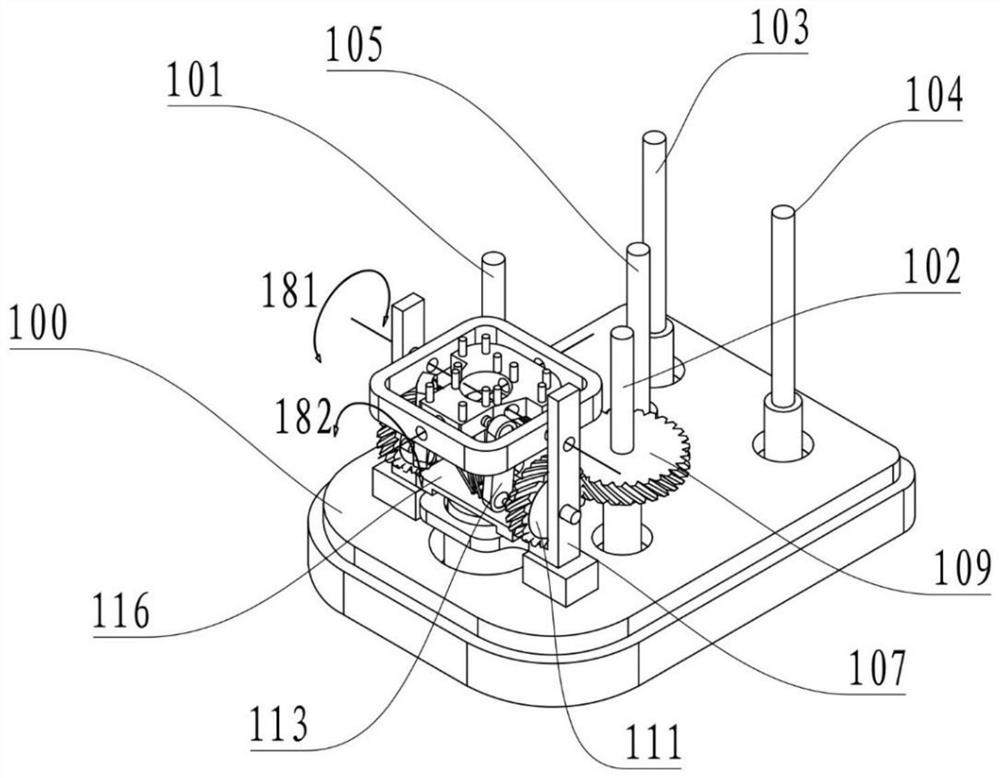
[0146] Please refer to Figures 1 to 6e as well as Figure 11a to Figure 13 ,in, figure 1 It is a schematic diagram of the overall structure of the surgical instrument in Embodiment 1 of the present invention; figure 2 is a schematic diagram of a surgical instrument according to Embodiment 1 of the present invention; Figure 3a It is a partial schematic diagram of the relevant components of the first drive shaft and the second drive shaft of the instrument drive device according to Embodiment 1 of the present invention; Figure 3b It is a partial schematic diagram of another angle of the instrument driving device in Embodiment 1 of the present invention; Figure 3c yes Figure 3a An exploded view of the instrument drive shown; Figure 4a It is a schematic diagram of the first turning member of Embodiment 1 of the present invention; Figure 4b It is a schematic diagram of the second turning member of Embodiment 1 of the present invention; Figure 4c It is a schematic di...
Embodiment 2
[0195] The instrument driving device, instrument end assembly, surgical instrument, and surgical robot in Embodiment 2 of the present invention are basically the same as Embodiment 1, and the same parts will not be described again, and only the differences will be described below.
[0196] Please refer to Figure 7a to Figure 7d ,in Figure 7a is a schematic diagram of a surgical instrument according to Embodiment 2 of the present invention; Figure 7b It is a partial schematic diagram of the relevant components of the third drive shaft and the fourth drive shaft of the instrument drive device according to the second embodiment of the present invention; Figure 7c It is a schematic diagram of the third driving shaft and the opening and closing assembly of the instrument driving device according to the second embodiment of the present invention; Figure 7d It is a schematic diagram of the fourth driving shaft and the opening and closing assembly of the instrument driving devi...
Embodiment 3
[0202] The instrument driving device, instrument end assembly, surgical instrument and surgical robot of the third embodiment of the present invention are basically the same as those of the first embodiment, the same parts will not be described, and only the differences will be described below.
[0203] Please refer to Figure 8 to Figure 10c ,in, Figure 8 is a schematic diagram of a surgical instrument according to Embodiment 3 of the present invention; Figure 9a It is a partial schematic diagram of related components of the first drive shaft and the second drive shaft in Embodiment 3 of the present invention; Figure 9b It is a schematic diagram of driving the movement of the second flipping member according to Embodiment 3 of the present invention; Figure 9c It is a partial schematic diagram of another angle for driving the movement of the second turning member according to Embodiment 3 of the present invention; Figure 10a It is a partial schematic diagram of the fir...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More