

Target speed estimation method based on sub-aperture radar interference
A technology of target velocity and sub-aperture, which is applied in the direction of measuring device, radio wave measurement system, radio wave reflection/reradiation, etc., can solve the problem of inability to distinguish whether the displacement comes from the horizontal direction or the vertical direction, the ambiguity of the surface deformation direction of the satellite interferometric radar, Unable to obtain 3D deformation and other problems, to achieve reliable technical support, improve imaging quality, and improve technical support
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0071] The following will clearly and completely describe the technical solutions in the embodiments of the present invention with reference to the accompanying drawings in the embodiments of the present invention. Obviously, the described embodiments are only some, not all, embodiments of the present invention.
[0072] The actual scene example is simulated below to illustrate the method for estimating the target speed based on sub-aperture radar interference of the present invention.
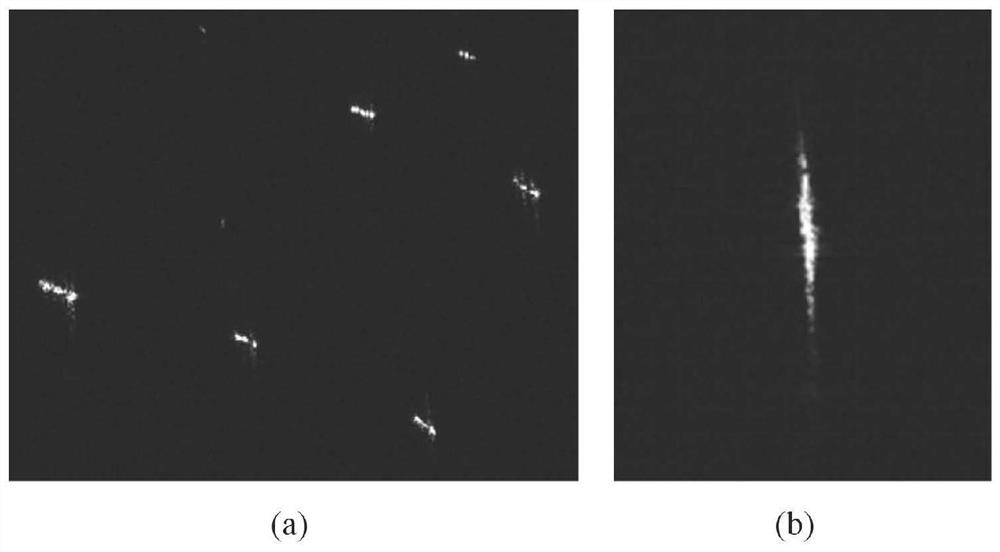
[0073] Example of actual scenario: figure 1 Comparison of RADARSAT-1 radar images of stationary ships and moving ships.
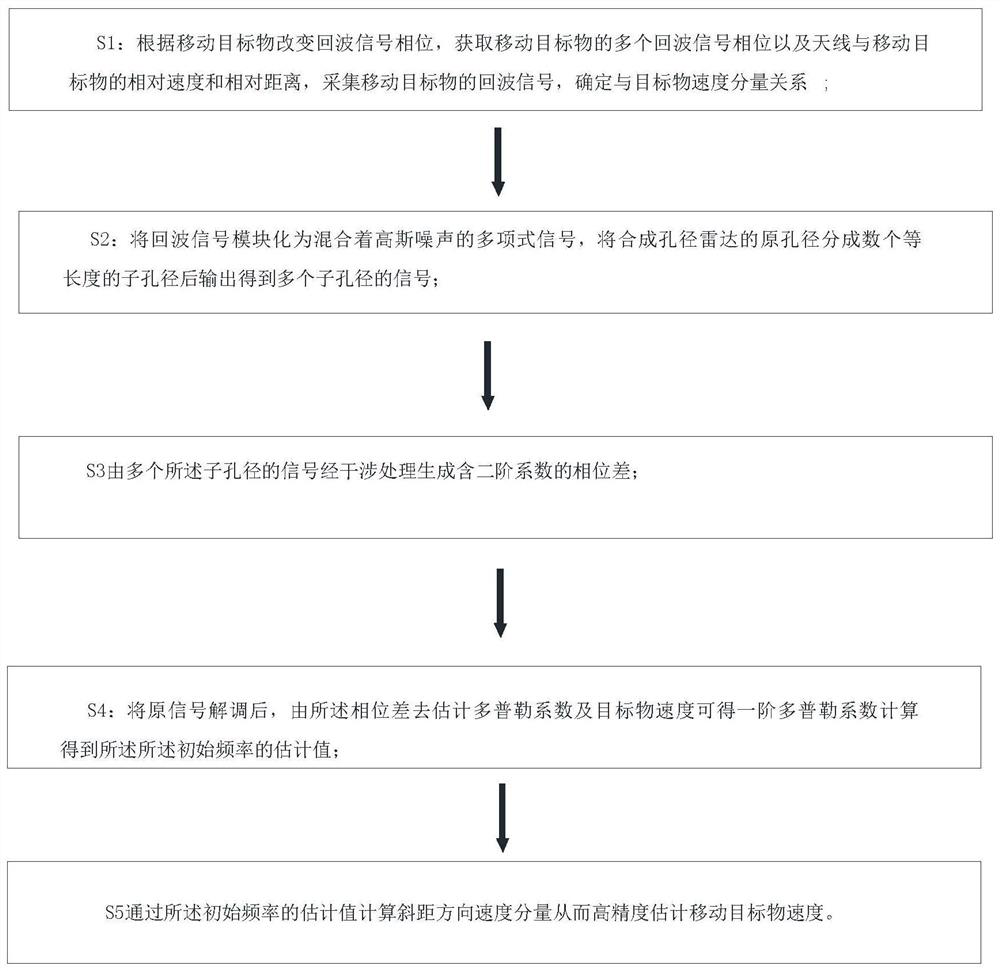
[0074] Such as figure 1 As shown, S1: change the echo signal phase according to the moving target, obtain multiple echo signal phases of the moving target and the relative speed and relative distance between the antenna and the moving target, collect the echo signal of the moving target, and determine the The relationship between the velocity components of the target obj...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More