

Self-balancing vehicle system based on multi-innovation Kalman filtering algorithm
A Kalman filter, self-balancing vehicle technology, applied in the control/regulation system, vehicle position/route/height control, non-electric variable control, etc. Avoid data inconsistencies, improve utilization, and control precise effects
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
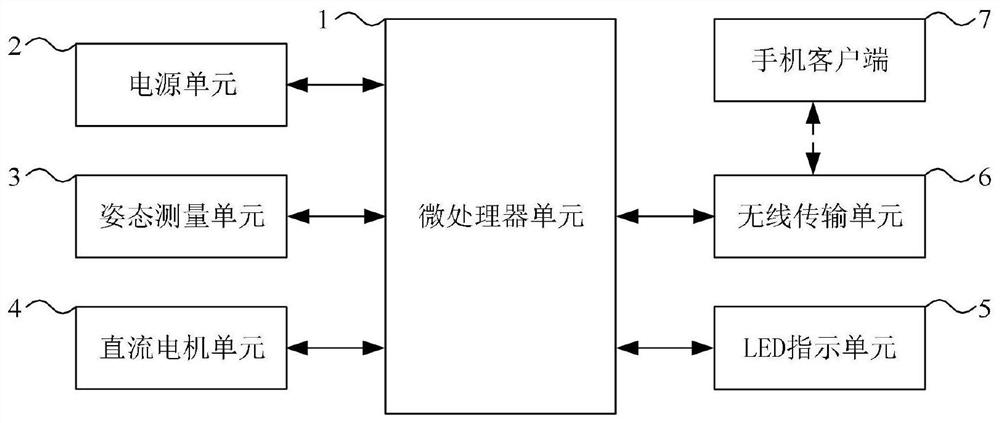
[0034] The invention provides a self-balancing car system based on multi-innovation Kalman filter algorithm, its structure is as follows figure 1 As shown, it includes a microprocessor unit 1 , a power supply unit 2 , an attitude measurement unit 3 , a DC motor unit 4 , an LED indicator unit 5 , a wireless transmission unit 6 and a mobile phone client 7 .
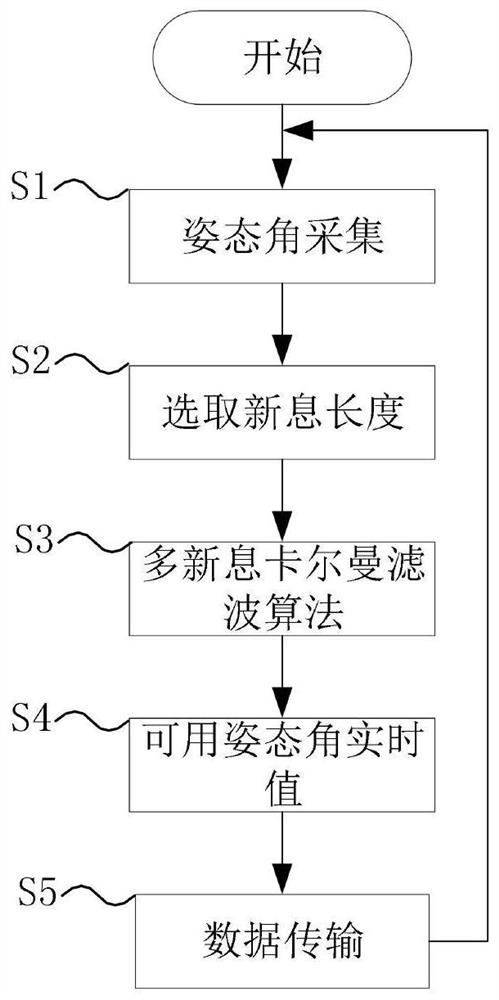
[0035] The microprocessor unit 1 is in charge of attitude data processing and control task scheduling of the self-balancing car; wherein the control tasks mainly include: attitude data processing using a multi-innovation Kalman filter algorithm; by controlling the duty cycle of the PWM wave, adjusting the Running speed; control the IO port connected to the LED indicator unit 5 to indicate the operation and fault status of the self-balancing vehicle; communicate with the wireless transmission unit 6 through the serial port; obtain the straight-ahead, backward, left-turn, and right-turn of the self-balancing vehicle Instructi...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More