

A roadside perspective over-the-horizon global fusion perception system based on deep learning
A technology of deep learning and perception system, which is applied in the field of roadside viewing angle over-the-horizon global fusion perception system, which can solve problems such as road congestion, achieve high accuracy, improve perceived sight distance, and improve reliability.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
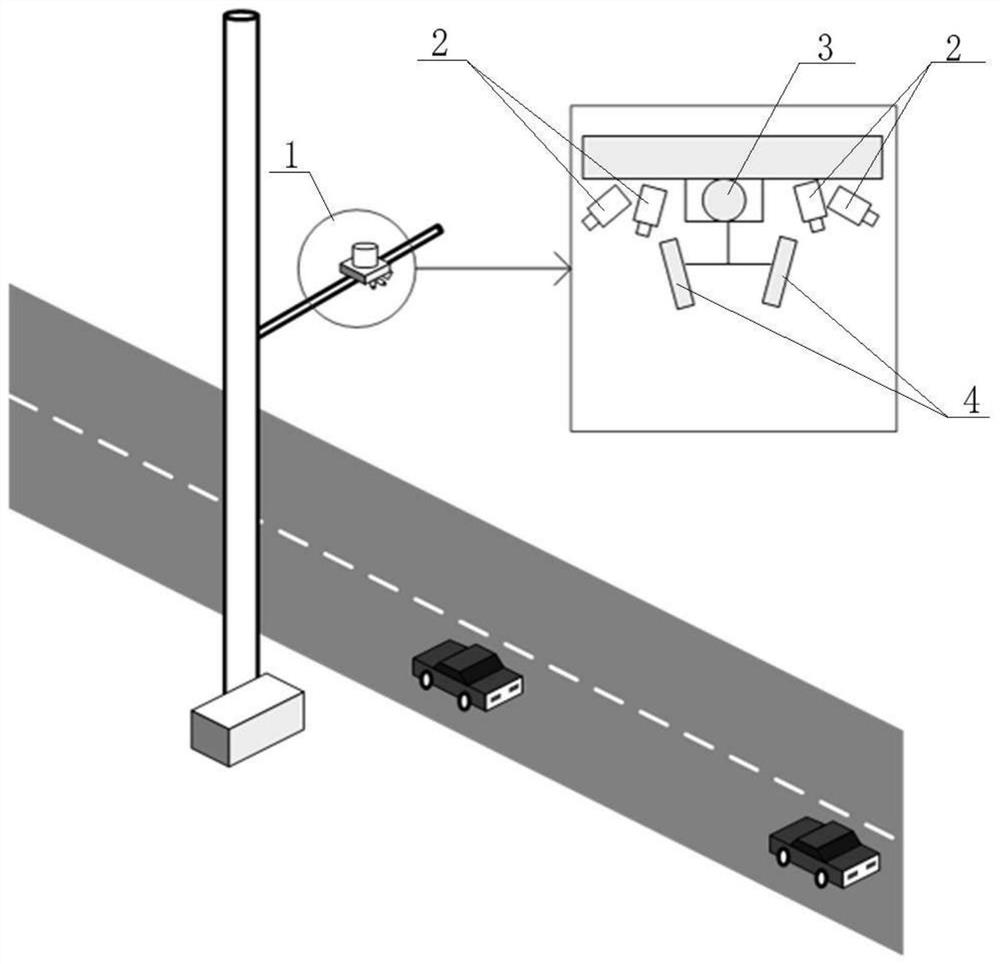
[0091] see Figure 1-7 shown:
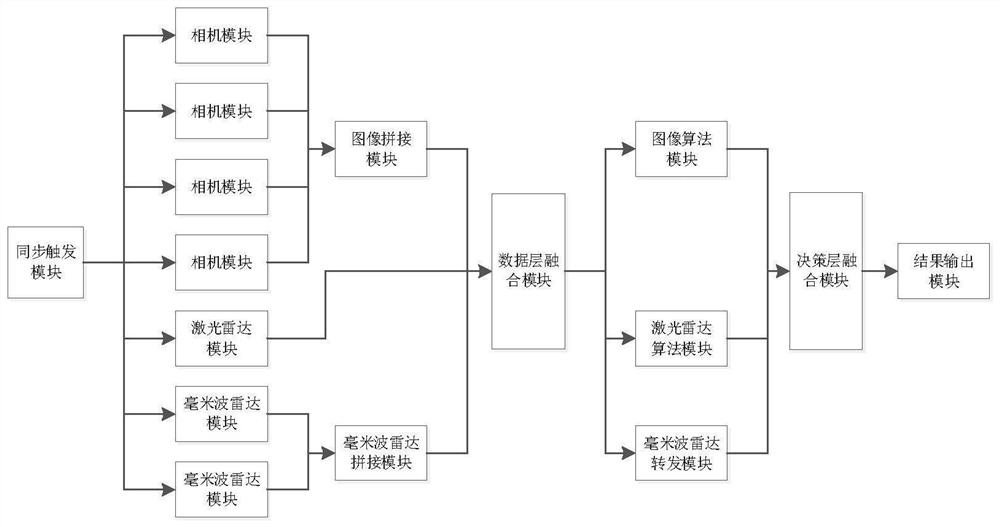
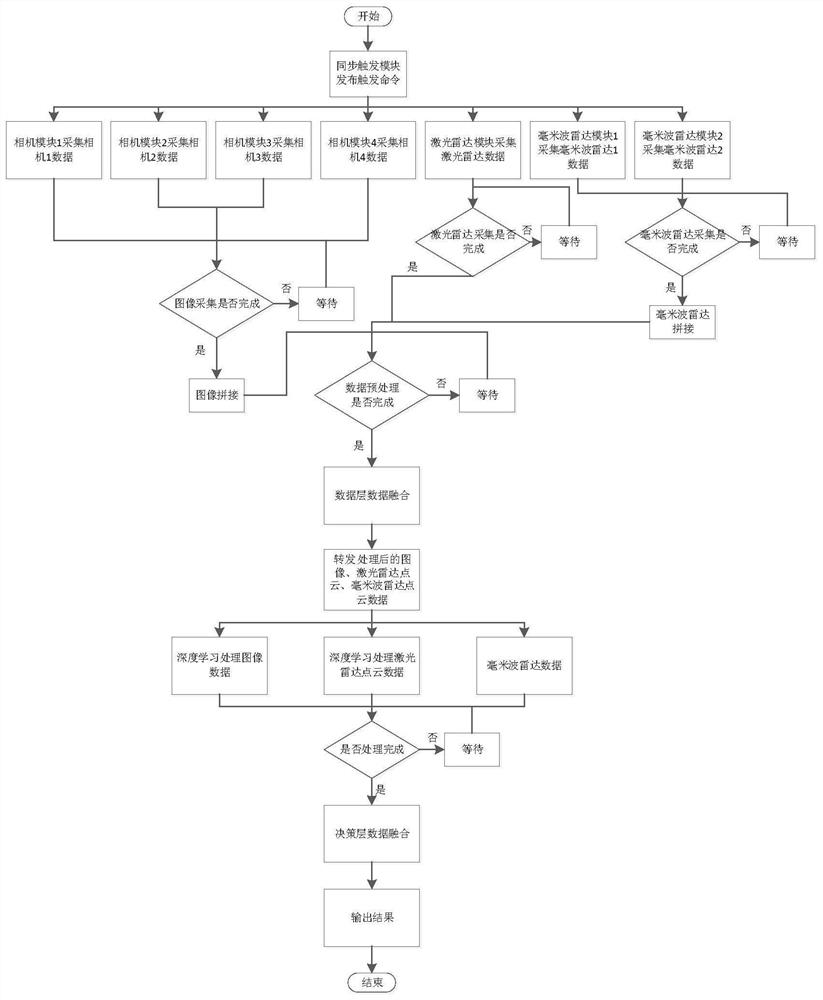
[0092] The present invention provides a roadside perspective over-the-horizon global fusion perception system based on deep learning, including a camera module, a laser radar module, a millimeter-wave radar module, an image splicing module, a millimeter-wave radar splicing module, a data layer fusion module, and an image splicing module. Algorithm module, lidar algorithm module, millimeter wave radar forwarding module, decision layer fusion module and result output module; specifically include the following steps:
[0093] Step 1. Arrange sensor modules 1 on the roadside gantry, namely camera modules, lidar modules and millimeter-wave radar modules, including at least four cameras 2, one lidar 3 and at least two millimeter-wave radars 4; cameras 2. Lidar 3 and millimeter-wave radar 4 are arranged at intersections or areas with blind areas of vision. When camera 2 is arranged, the acquisition range of camera 2 should cover the entire road to be ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More