

Discrete Fractional Order Sliding Mode Control Method for Contour Tracking of Linear Motor Platform
A technology of fractional-order sliding mode and fractional-order sliding mode surface, which is applied in the general control system, adaptive control, control/regulation system, etc., and can solve the problems of low control precision, unsuitable digital processor, unstable control process, etc. problems, achieve high control accuracy, avoid chattering effects, and achieve good contour tracking control effects
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
specific Embodiment approach 1
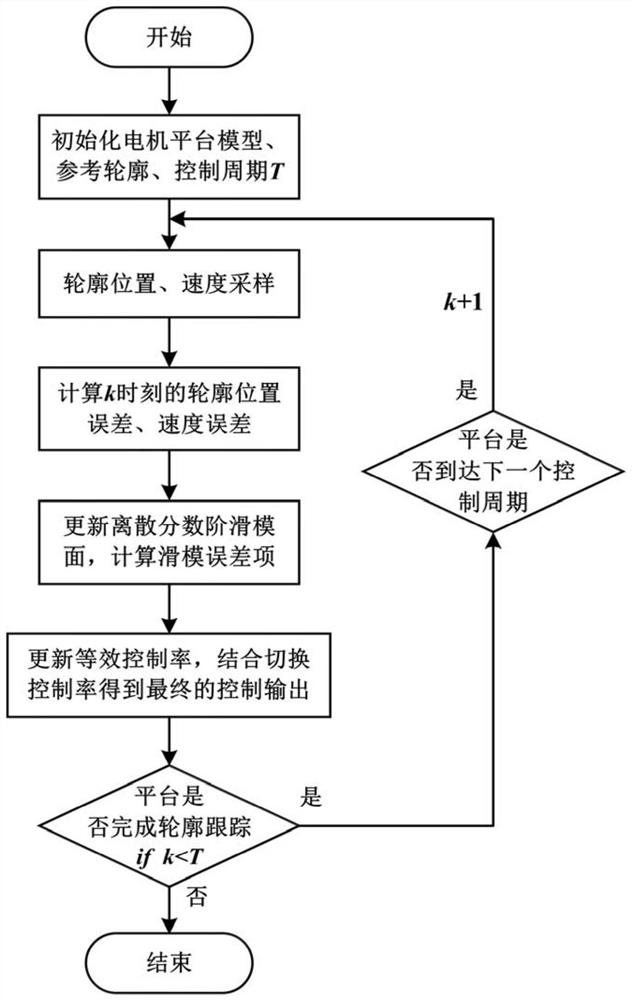
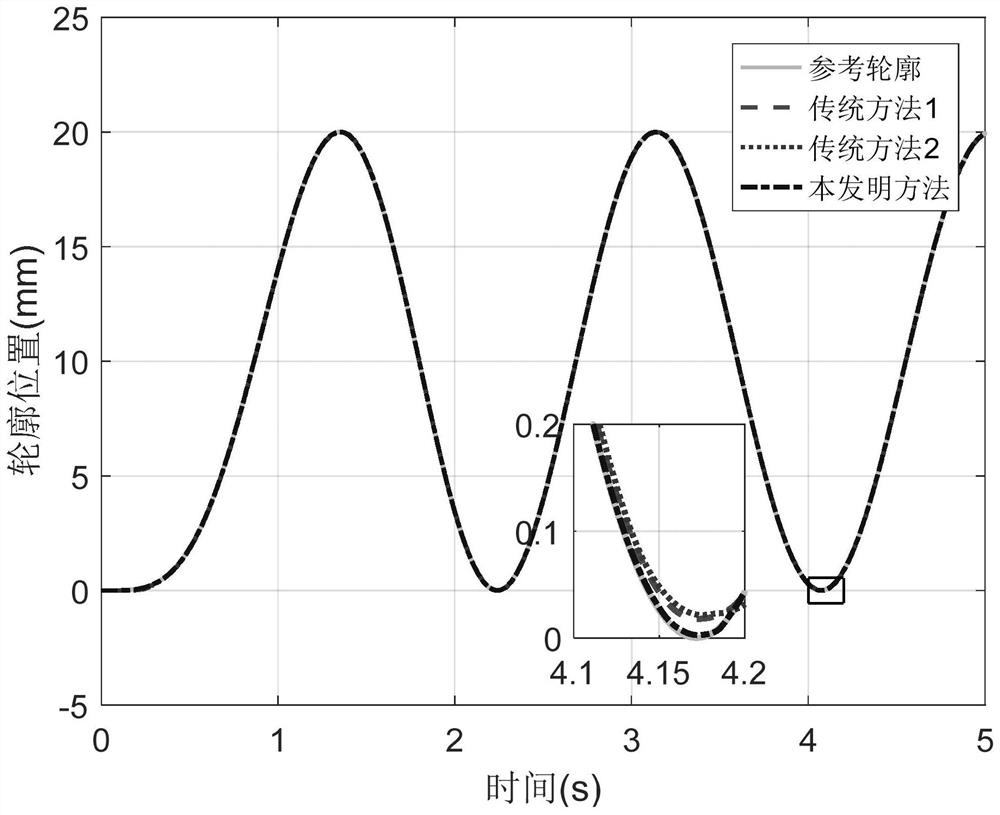
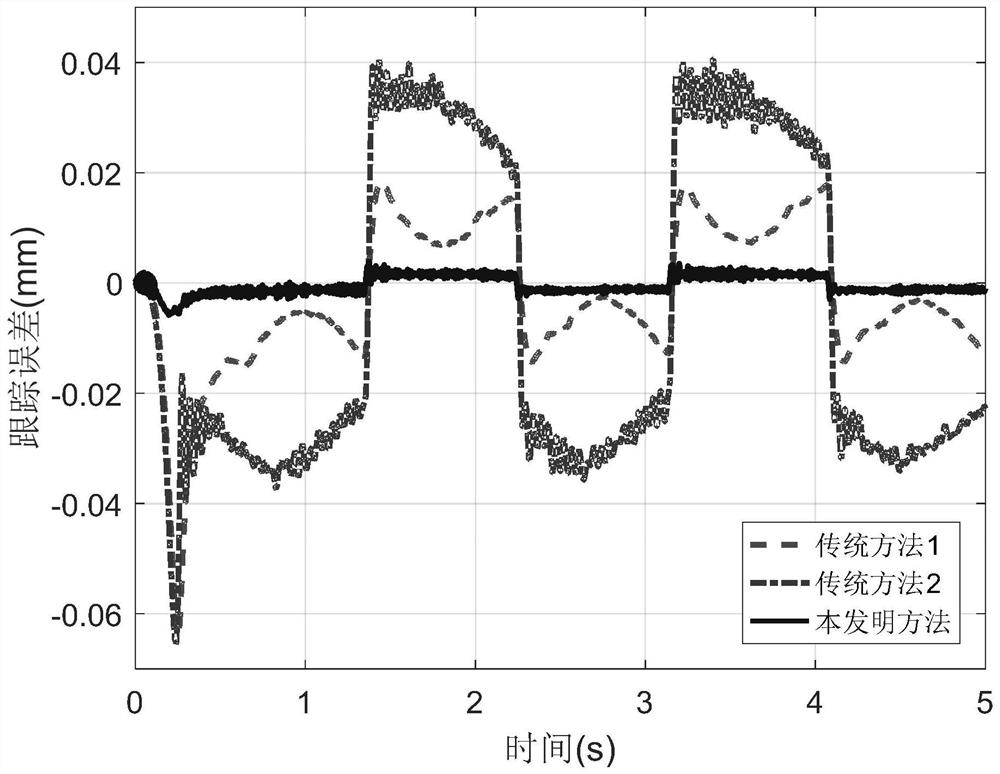
[0053] Specific implementation mode 1. Combination figure 1 This embodiment will be described. A discrete fractional-order sliding mode control method for linear motor platform contour tracking described in this embodiment can effectively solve the problem of incompatibility between traditional continuous time control methods and digital processors, and improve the control accuracy of platform contour tracking. Stabilize the control process and save control costs. In addition, when considering the existence of interference and uncertainty in engineering practice, the method of the present invention can still ensure high-speed, high-precision contour tracking control performance. The inventive method specifically comprises the following steps:
[0054] Step 1: Set the sampling interval h of the control method, obtain the sampling time as t=kh, and k is the discrete system time after sampling. For the linear motor platform system, a discrete linear motor platform system model...
specific Embodiment approach 2
[0078] Specific embodiment 2: This embodiment is a further limitation to specific embodiment 1. The discrete fractional operator is calculated according to the definition of Grünwald-Letnikov fractional order, and its specific expression is as follows:
[0079]
[0080] Among them, λ is any real number, and g(λ, j) is a binomial expression as follows
[0081]
[0082] Other steps and parameters are the same as those in Embodiment 1.
specific Embodiment approach 3
[0083] Specific implementation mode three: this implementation mode is a further limitation to specific implementation mode two. Considering practical engineering applications, a finite step size L is used to calculate the discrete fractional operator as follows, and L is determined according to the digital processor memory and calculation efficiency The positive integer of , thus the discrete fractional order sliding mode method can reduce the cost of control calculation based on the concept of digital control.
[0084]
[0085] where the sum of the coefficients can be expressed as
[0086] Other steps and parameters are the same as in the second embodiment.
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More