

Parallel ankle joint rehabilitation system flexibly driven by pneumatic muscles and control method thereof
A pneumatic muscle and ankle joint technology, which is applied in the directions of muscle training equipment, sports accessories, passive exercise equipment, etc., can solve the problems of difficulty in realizing the patient's rehabilitation training needs, poor flexibility and safety, and a single rehabilitation training mode, and achieve convenient The effect of layout and replacement, low cost and stable system performance
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0037] The present invention will be described in further detail below in conjunction with the accompanying drawings.
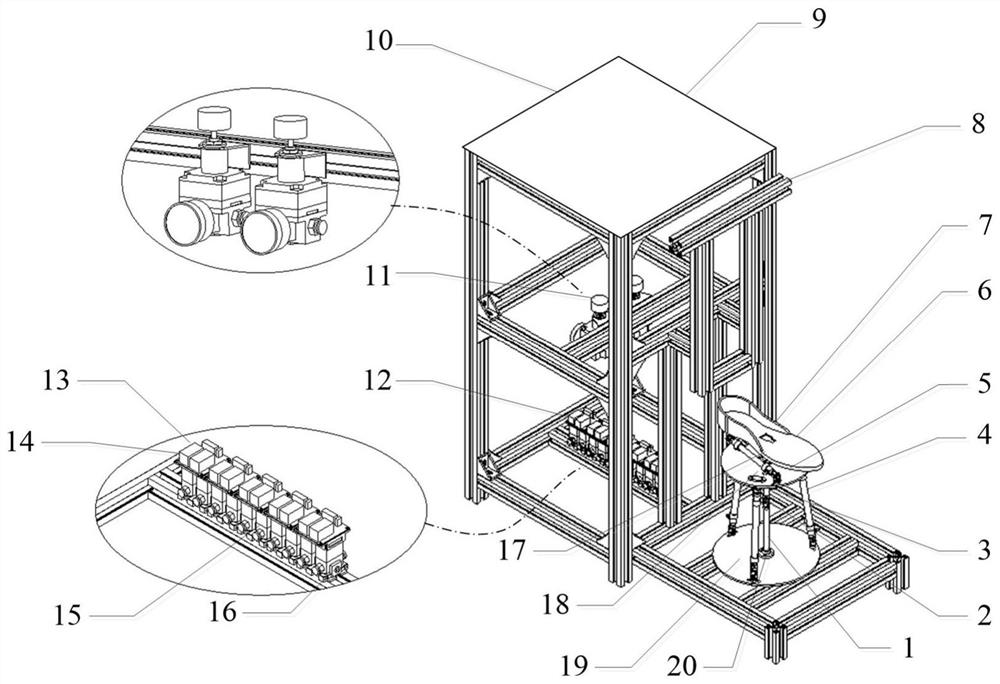
[0038] see figure 1According to the present invention, a parallel ankle joint rehabilitation system driven by pneumatic muscles is flexible, and the parallel ankle joint rehabilitation system includes a parallel ankle joint rehabilitation mechanism 7 connected together by bolts and nuts, a control seat 9 and a main control system; Wherein, the parallel ankle joint rehabilitation mechanism 7 includes an upper platform 5, a lower platform 19, a foot support module 6, a pneumatic muscle 4, a foot support support rod 17, an upper support rod 3, a lower support rod 1, a flange 20, a Lanpan 18 and Hooke hinge 2; said lower platform 19 is fixedly installed on the frame of the front part of the control seat 9, and the lower support rod 1 is fixedly connected to the center of the lower platform 19 through the flange 20, and the upper support rod 3 The center of the u...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More