Auxiliary manipulator system based on multiple sensors and force feedback and using method of auxiliary manipulator system
A multi-sensor and manipulator technology, applied in the field of robotics, can solve problems such as gaps, insufficient precision, and high learning costs for operators
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment
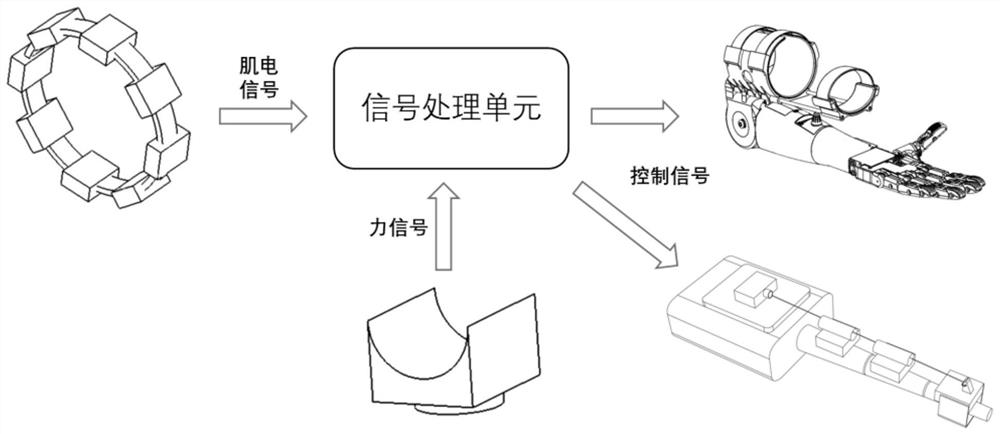
[0047] Such as figure 1 As shown, this embodiment provides an auxiliary manipulator system based on multi-sensors and force feedback, including a manipulator unit, a force feedback unit, a sensor unit and a signal processing unit.
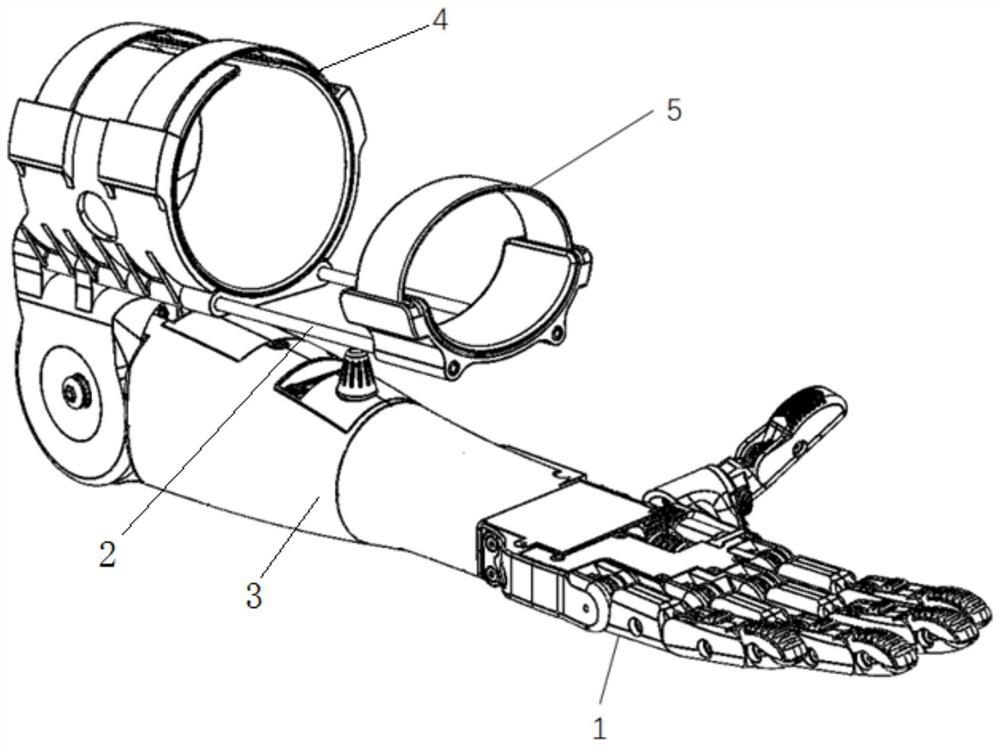
[0048] Such as figure 2 As shown, the manipulator unit includes a connected arm structure 3 and a hand execution structure 1, the arm structure is provided with a first arm fixture 4 and a second arm fixture 5, in this embodiment, the first arm fixture is through The rotatable shaft is connected to the arm structure, and the second arm fixing part is connected to the second arm fixing part through two parallel hard links 2, so that the second arm fixing part is located at the arm structure. The user can wear the entire robot unit on the arm by wearing the first arm mount and the second arm mount.
[0049] The first driving motor of the manipulator unit is installed in the arm structure, and the signal processing unit is connected to the first dr...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com