

Mechanical arm motion control delay measuring system based on visual inspection and method thereof
A technology of motion control and visual inspection, applied to manipulators, manufacturing tools, etc., can solve problems such as not considering robot differences, interference with normal robot operation, and distortion of measurement results
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0036] The present invention will be further described in detail below in conjunction with the accompanying drawings and specific embodiments.
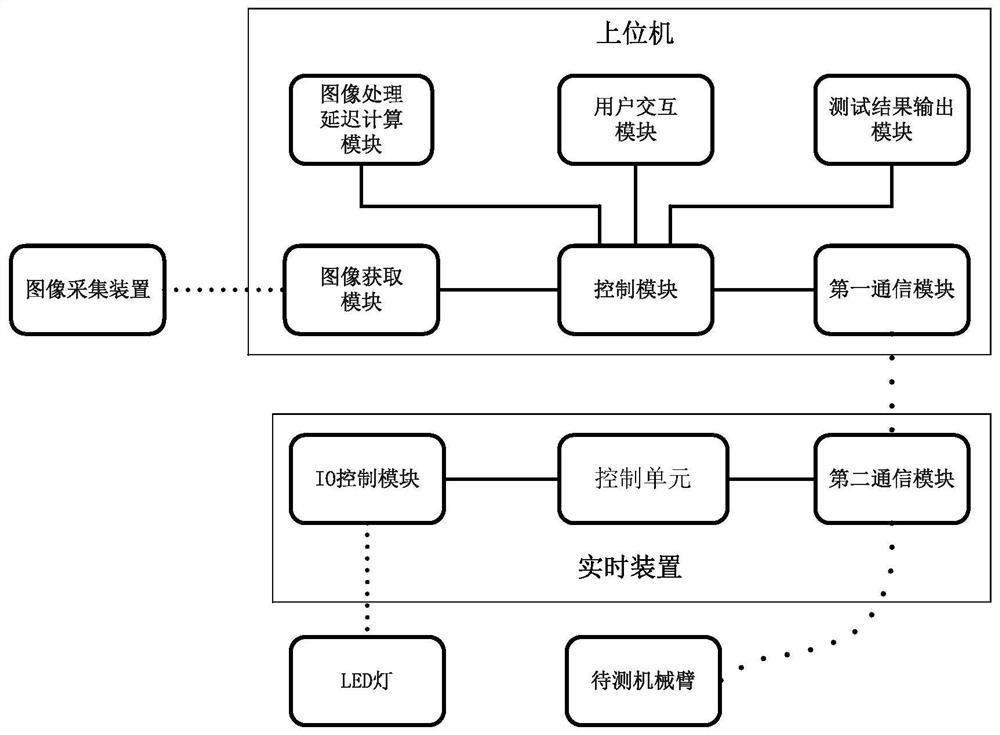
[0037] refer to image 3 , a kind of mechanical arm motion control delay measurement system based on vision detection of the present embodiment, comprises upper computer, real-time device, image acquisition device, LED light, upper computer is connected with real-time device, image acquisition device respectively, and real-time device is connected with LED respectively The light and the control interface of the robotic arm are connected. In this implementation, the measured object is the mechanical arm of a six-axis industrial robot, and the image acquisition device is a high-speed camera, specifically a pco.dimaxHS1 high-speed camera with a resolution of 800*600 and a frame rate of up to 13000FPS. The upper computer communicates with the real-time device through Ethernet. The real-time device communicates with the six-axis industri...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More