

A Global Fast Terminal Sliding Mode Control Method Based on Invariant Manifold Observer
A terminal sliding mode and control method technology, which can be applied to controllers with specific characteristics, electric controllers, etc., can solve problems such as chattering of underwater robots, difficulty in parameter adjustment, etc., to improve anti-interference, reduce observation errors, parameters less effect
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0045] Below in conjunction with embodiment, the present invention is further described, but does not constitute any limitation to the present invention, and the limited number of modifications done by anyone in the scope of the claims of the present invention are still within the scope of the claims of the present invention.
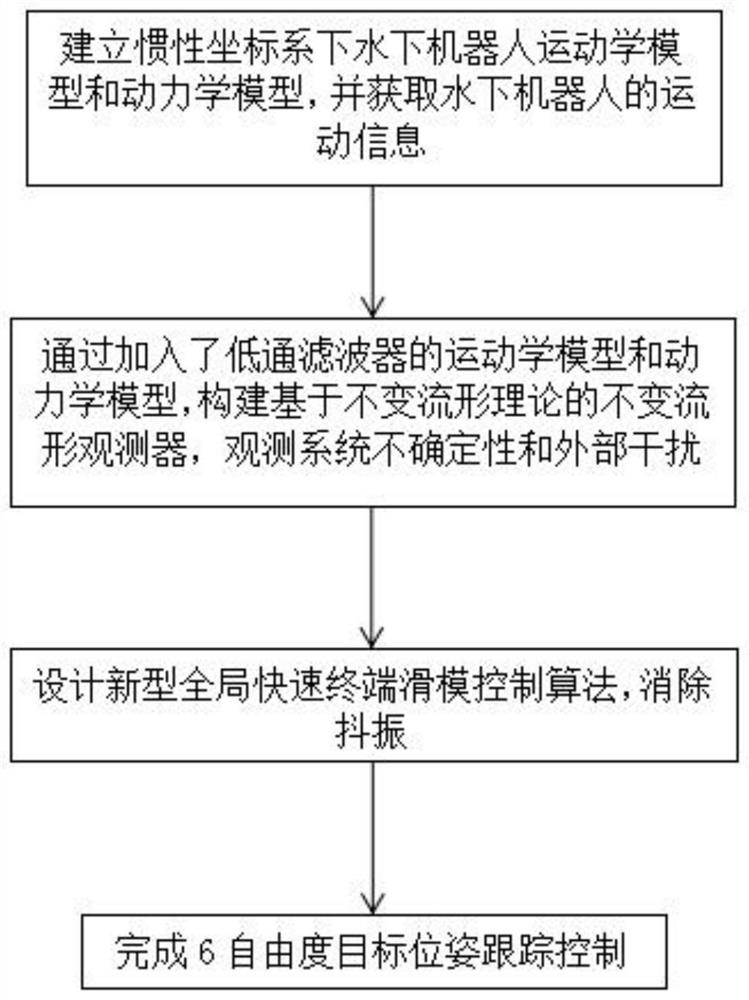
[0046] see figure 1 , a global fast terminal sliding mode control method based on an invariant manifold observer of the present invention acquires the motion parameters of the underwater robot in real time. Among them, the motion parameters include the pose, speed signal and control signal of the underwater robot. Control signals include control force and torque matrices. It should be noted that, in the process of motion, the underwater robot relies on the kinematic model and dynamic model to realize the control of the motion of the underwater robot. The kinematic model outputs the velocity signal, and the dynamics model outputs the control signal. T...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More