A UAV Navigation Method Based on Semantic vslam
A navigation method and unmanned aerial vehicle technology, applied in navigation, surveying and mapping and navigation, navigation computing tools, etc., can solve the problems of high cost of lidar, complex indoor environment, complex placement of low-light objects, etc., to improve accuracy and pan- The effect of optimizing ability, increasing planning speed, and reducing loss of accuracy
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0032] The present invention will be further described below in conjunction with the accompanying drawings and specific embodiments.
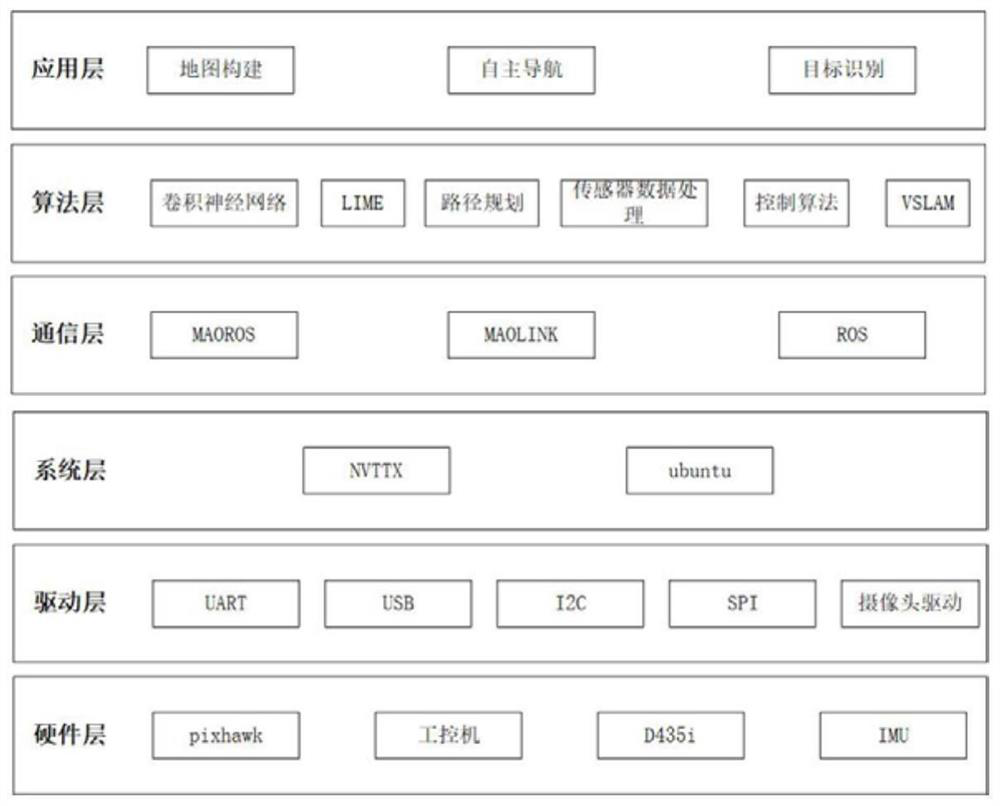
[0033] like figure 1 As shown, the present invention is divided into application layer, algorithm layer, communication layer, software driver layer and hardware layer five parts, and application layer is the existing function realized by the present invention, considers expansibility during design, leaves software extension interface , and other functions can be developed on the present invention. The main functions include visual map construction, autonomous navigation and target recognition, fixed-point altitude determination, track flight, etc.; the algorithm layer is the core layer of the present invention, which is divided into upper-level perception algorithm layer and lower-level control Algorithmic layer. The upper layer mainly includes target detection convolutional neural network Yolov4-tiny, path planning algorithm FAST-planner, A*,...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More 
PatSnap Eureka turns technology decisions into work you can execute. Powered by our Innovation Knowledge Graph, it runs expert workflows across engineering, life sciences, materials and intellectual property. Get your review-ready output in minutes.



