

Unmanned aerial vehicle autonomous take-off and landing cruising method based on digital twinning
A drone and twin technology, applied in the field of digital twins, can solve problems such as safety and efficiency hidden dangers, achieve precise interaction, realize interaction, and ensure fault tolerance and robustness.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image


Examples
Embodiment Construction
[0044] Referring to the accompanying drawings, the present invention provides a digital twin-based drone autonomous take-off and landing cruise method, comprising the following steps:
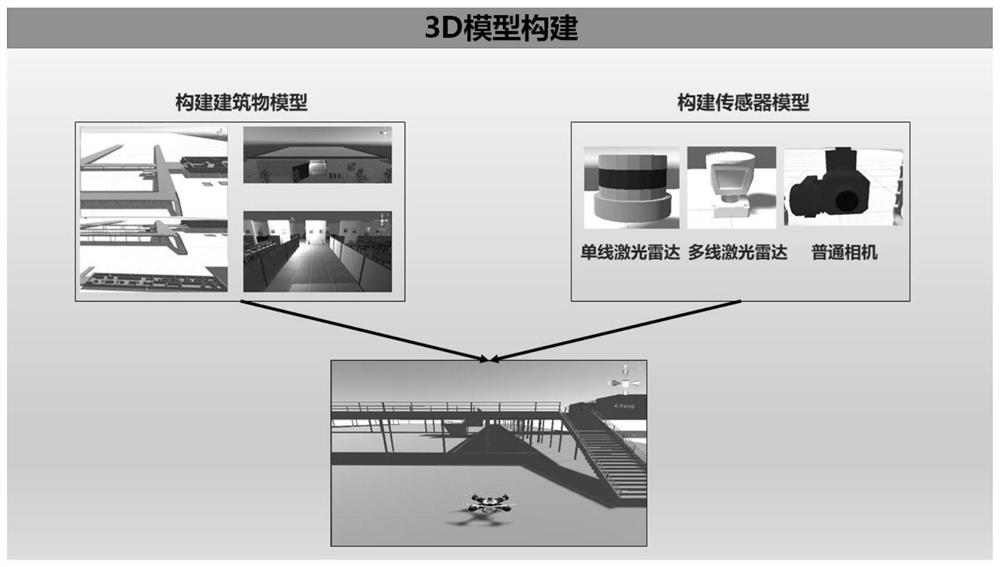
[0045] Step 1, build the drone 3D model and scene.
[0046] The 3D model of the UAV in the simulation and the scene such as figure 1 As shown, use the analog terminal Unity to build 3D drone models, sensor models, and indoor and outdoor scene models, mark the established drone models, and set the drone model and the 3D rigid bodies of buildings in indoor and outdoor scenes Rigidbody, Character Controller and setting the position of all scenes, coloring the background, adding colliders to the drone model, setting the rotor, controlling the position of the drone model and local rendering and texture of the drone model to make it more realistic The sense of technology and realism achieves the beauty of the Unity scene and is close to the real scene.
[0047] Step 2, design the UAV to take off an...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More