Three-dimensional reconstruction error active correction method based on unmanned aerial vehicle
A 3D reconstruction and drone technology, applied in 3D modeling, computer parts, image data processing, etc., can solve problems such as field of view errors, lack of monitoring, and standards affecting key frame selection.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment
[0044] In order to verify the effectiveness of the method, in the virtual simulation platform environment, the 3D reconstruction experiment under the positioning of the flying camera, the evaluation of the image field of view loss and the reselection of the key frame is carried out, and the 3D static region of interest can be obtained from the commercial satellite data artificially. The digital elevation model (DEM) of the aircraft is represented in the form of point cloud, and the flight trajectory planned in the previous stage is obtained based on the shooting constraints of the equidistant orthographic view.
[0045] Example:
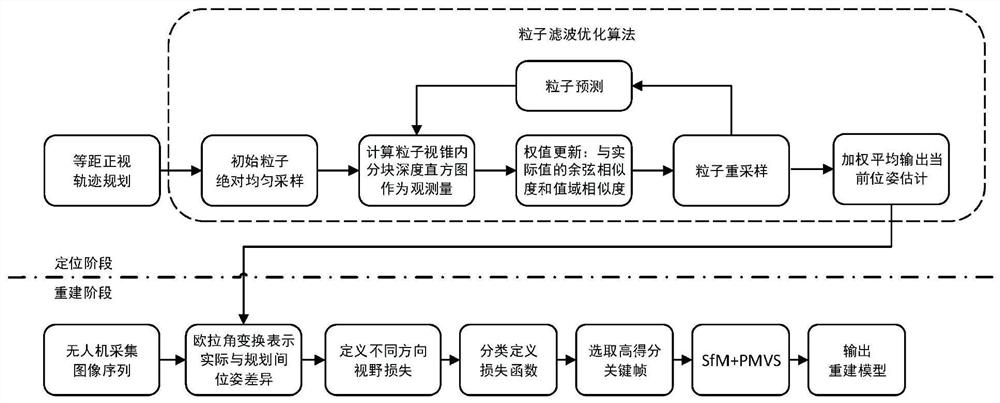
[0046] Such as figure 1 , 2 As shown, this embodiment will check the effectiveness of the method based on the process, including the following specific steps:
[0047] Step 1: Use the equidistant orthographic constraint to plan the shooting trajectory of the UAV to achieve the desired 3D reconstruction optimization effect;
[0048] Step 2: Positio...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More