Snakelike robot adaptive path following controller based on tracking error and time-varying coefficient prediction and design method thereof
A snake-like robot, tracking error technology, applied in the direction of adaptive control, general control system, control/adjustment system, etc., can solve the complex and changeable motion environment of multi-joint snake-like robots, and the increase of snake-like robot motion position errors. , to achieve the effects of improving convergence speed and stability, improving motion efficiency and tracking accuracy, and ensuring stability
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0105] In order to make the features and advantages of this patent more obvious and easy to understand, the following special examples are described in detail as follows:
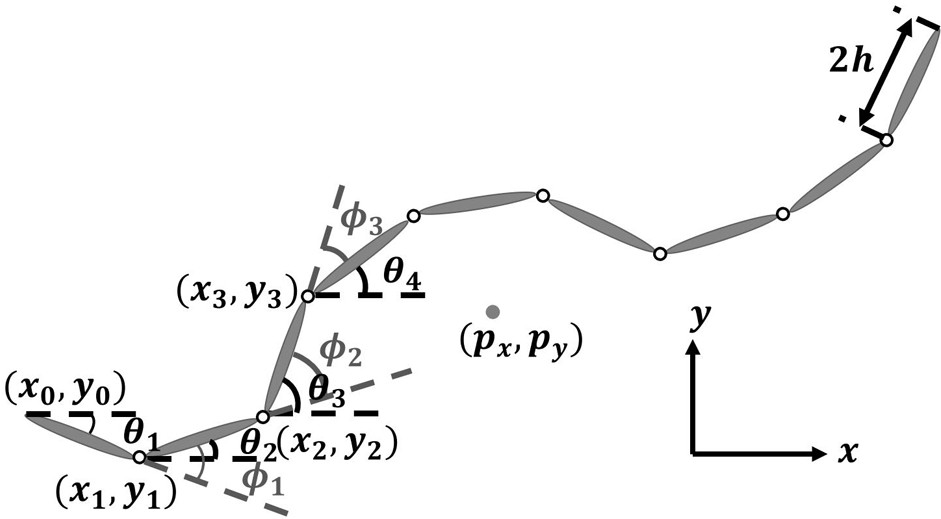
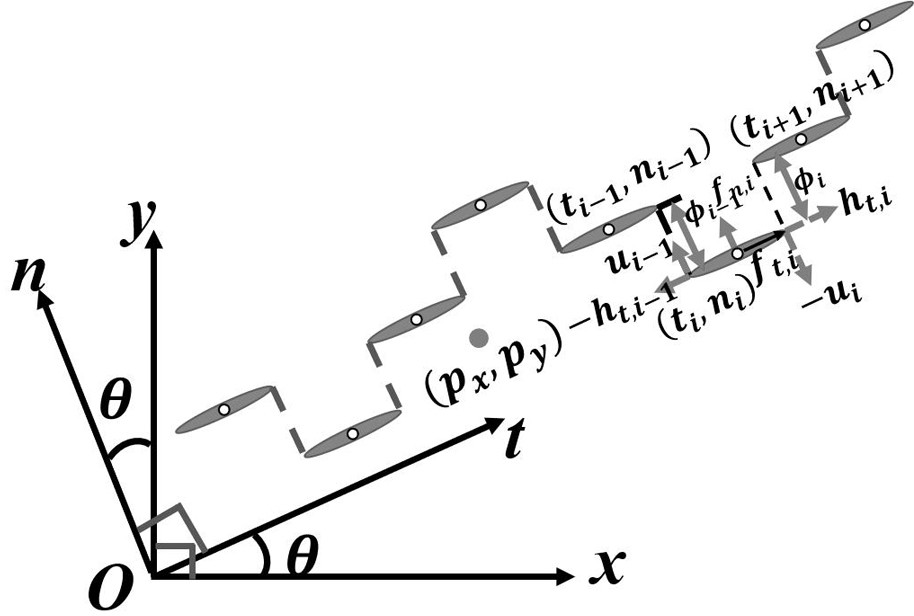
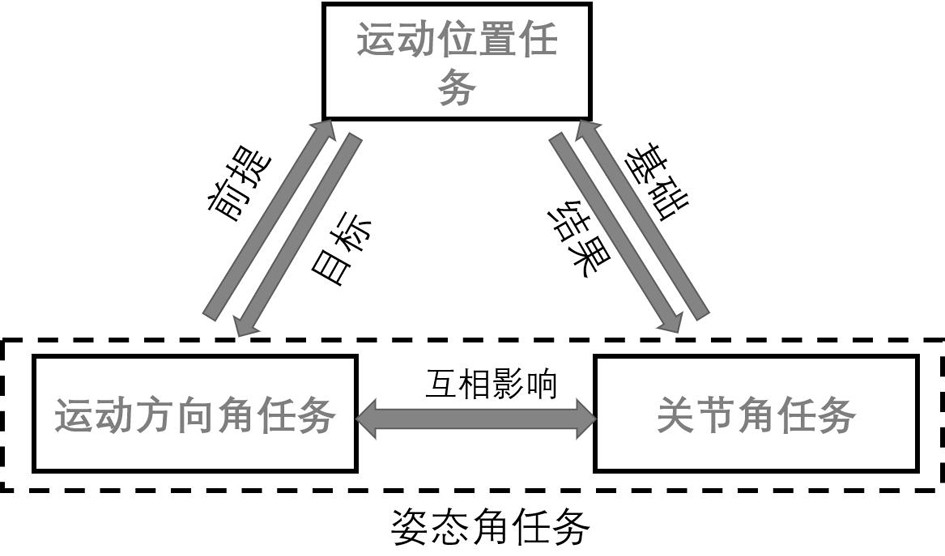
[0106]In this embodiment, starting from the requirements of the multi-joint snake-like robot, combined with the motion characteristics of the multi-joint snake-like robot, an adaptive path-following controller for the snake-like robot based on tracking error and time-varying coefficient prediction is designed: it is based on the multi-joint snake The control function of snake-shaped robot kinematics model and gait joint, according to the dynamic control task and attitude control task in the snake-shaped robot path following process, described dynamic control task is used to make the motion position error convergence of snake-shaped robot; The control task is used to converge the robot's motion direction angle error and joint direction angle error; based on the predicted value of the snake robot's motion posi...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More