Three-degree-of-freedom parallel robot and modeling method thereof
A robot and degree-of-freedom technology, used in manipulators, program-controlled manipulators, manufacturing tools, etc., to solve problems such as adjustment damage and limited working range of manipulators
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0044] The present invention will be further described below in conjunction with the accompanying drawings and embodiments.
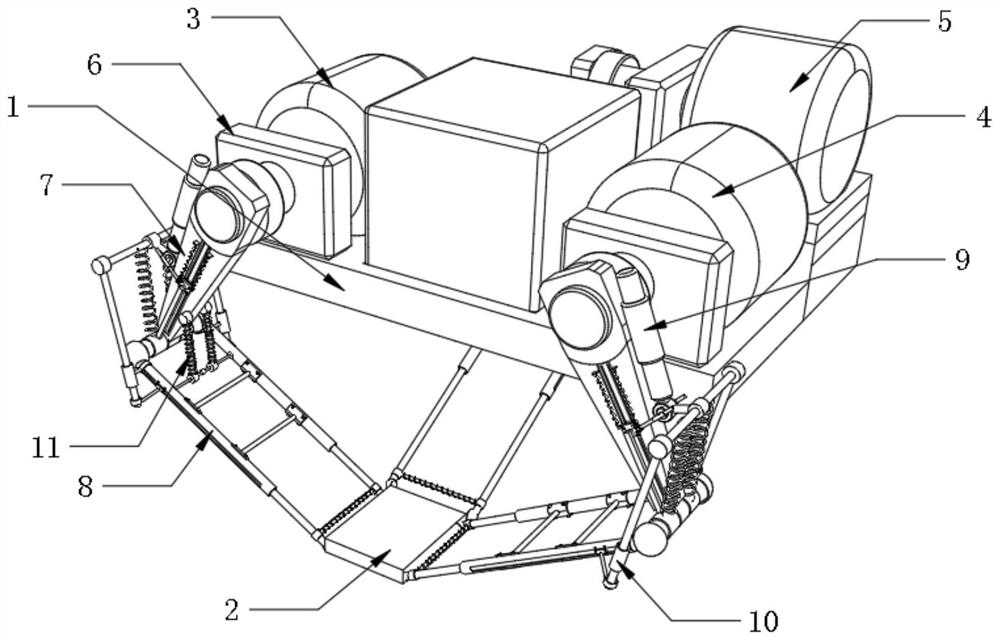
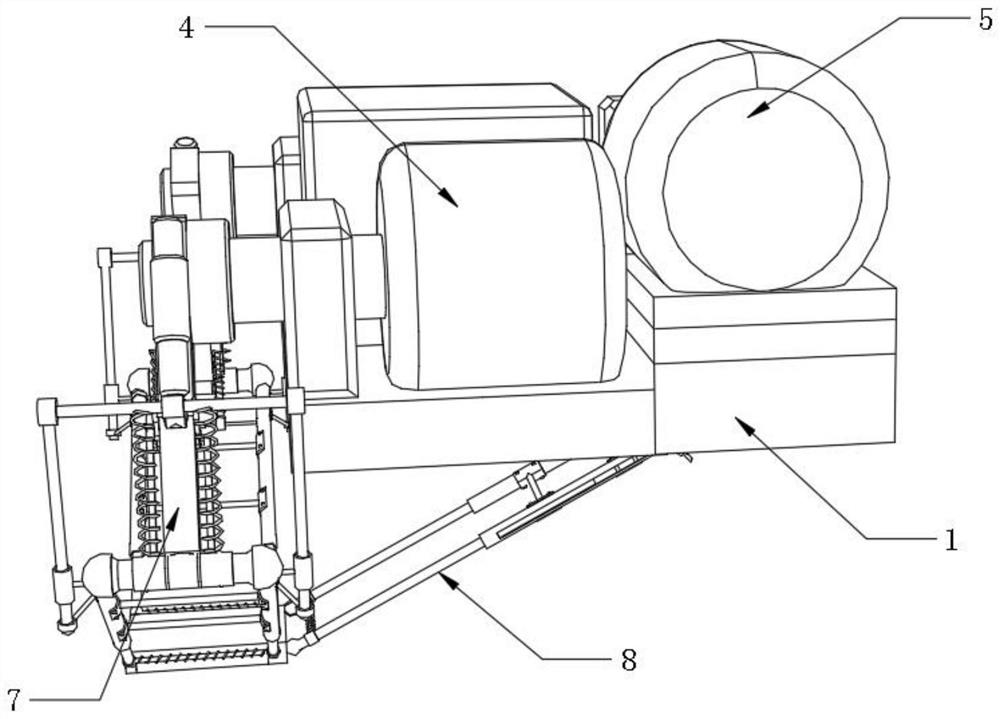
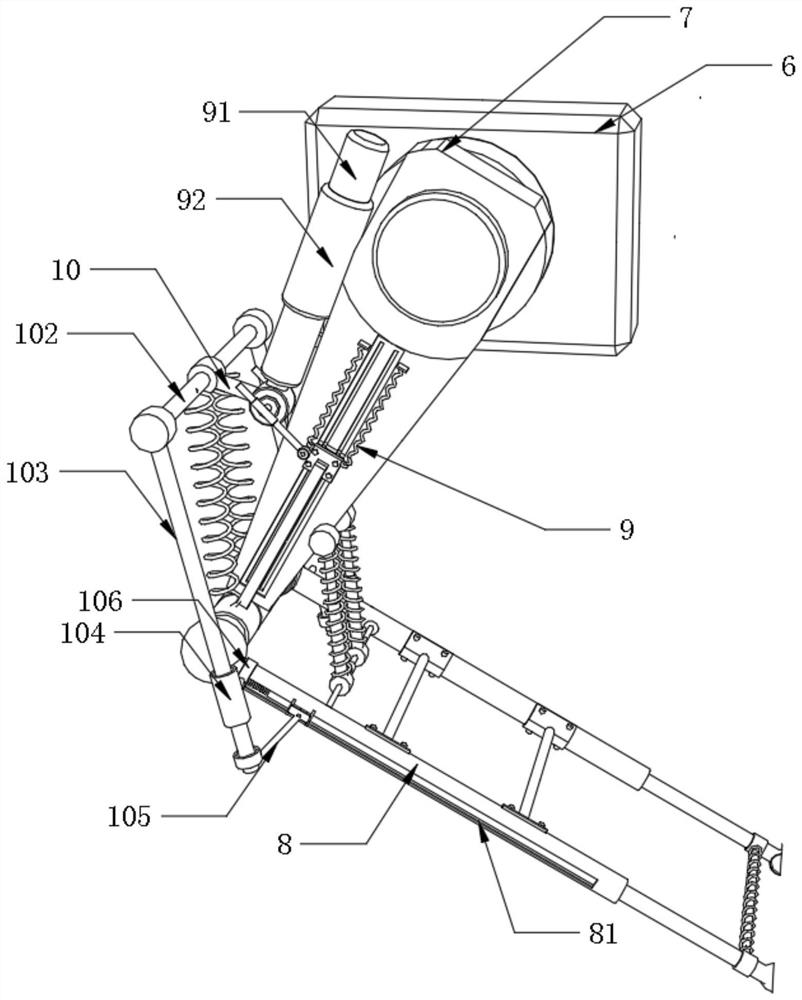
[0045] Please refer to figure 1 , figure 2 , image 3 , Figure 4 , Figure 5 , Figure 6 , Figure 7 , Figure 8 , Figure 9 , Figure 10 with Figure 11 ,in, figure 1 A schematic diagram of the overall structure provided for the present invention; figure 2 A schematic diagram of the overall side structure provided by the present invention; image 3 A schematic diagram of the connection between the active swing arm and the driven swing provided by the present invention; Figure 4 One of the structural schematic diagrams of the active arm telescoping mechanism provided by the present invention; Figure 5 The second schematic diagram of the structure of the active arm telescoping mechanism provided by the present invention; Figure 6 One of the structural schematic diagrams of the telescoping mechanism of the driven arm provided by the pr...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More