

Three-dimensional point cloud map construction method and system, electronic equipment and storage medium
A map construction and three-dimensional point cloud technology, applied in the field of map surveying and mapping, can solve the problem of difficult to accurately determine the key frame point cloud, and achieve the effect of dense target point cloud map and stable pose map
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
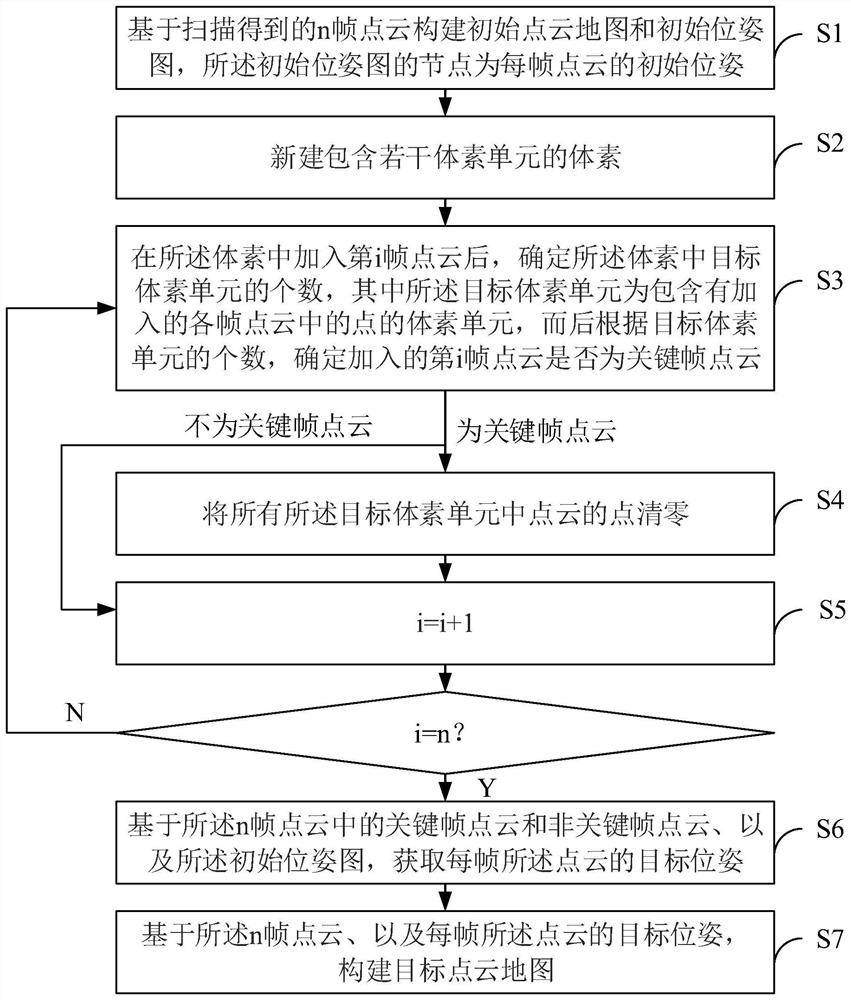
[0067] This embodiment provides a method for constructing a three-dimensional point cloud map, such as Figure 1-5 As shown, the method specifically includes the following steps:
[0068] S1. Construct an initial point cloud map and an initial pose graph based on the scanned n frames of point clouds, where the nodes of the initial pose graph are the initial poses of the point cloud in each frame.
[0069] Specifically, suppose there are n frames of point clouds P={p i ,i=0,1,…,n}, first read the point cloud p of the 0th frame 0 , as the initial point cloud map M 0 , and then sequentially read each frame point cloud p i ,p i with the point cloud map M i-1 Carry out an iterative closest point registration algorithm based on point-to-plane distance. After registration, p i Join M i-1 Form M i , and get the initial pose T of each frame point cloud i , where point cloud p of frame 0 0 The initial pose T of 0 is a fourth-order identity matrix.
[0070] According to the a...
Embodiment 2
[0093] This embodiment provides a three-dimensional point cloud map construction system, such as Figure 6 As shown, the system includes:
[0094] The initial graph construction module 11 is used to construct an initial point cloud map and an initial pose graph based on the n-frame point clouds obtained by scanning, and the nodes of the initial pose graph are the initial poses of the point cloud in each frame;
[0095] A voxel building module 12, configured to create a new voxel comprising several voxel units, wherein the three-dimensional size of the voxel is not smaller than the three-dimensional size of the initial point cloud map;
[0096] The key frame determination module 13 is used to determine the number of target voxel units in the voxel after adding the i-th frame point cloud in the voxel, wherein the target voxel unit is each frame that contains the added The voxel unit of the point in the point cloud, then according to the number of the target voxel unit, determin...
Embodiment 3
[0117] Figure 7 It is a schematic structural diagram of an electronic device shown in an example embodiment of the present invention, and shows a block diagram of an exemplary electronic device 60 suitable for implementing an embodiment of the present invention. Figure 7 The electronic device 60 shown is only an example, and should not impose any limitation on the functions and application scope of the embodiment of the present invention.
[0118] Such as Figure 7 As shown, electronic device 60 may take the form of a general-purpose computing device, which may be a server device, for example. Components of the electronic device 60 may include, but are not limited to: at least one processor 61 , at least one memory 62 , and a bus 63 connecting different system components (including the memory 62 and the processor 61 ).
[0119] The bus 63 includes a data bus, an address bus and a control bus.
[0120] The memory 62 may include a volatile memory, such as a random access me...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More