

Active hiding method when patrol robot executes tracking task
A patrol robot and task technology, applied in neural learning methods, instruments, computer parts, etc., can solve the problems of lack of active self-protection, failure of patrol tasks, economic and property losses, etc., to improve the real-time detection and classification accuracy. , the effect of reducing the amount of parameters
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0041] Below in conjunction with accompanying drawing, the present invention will be further explained;
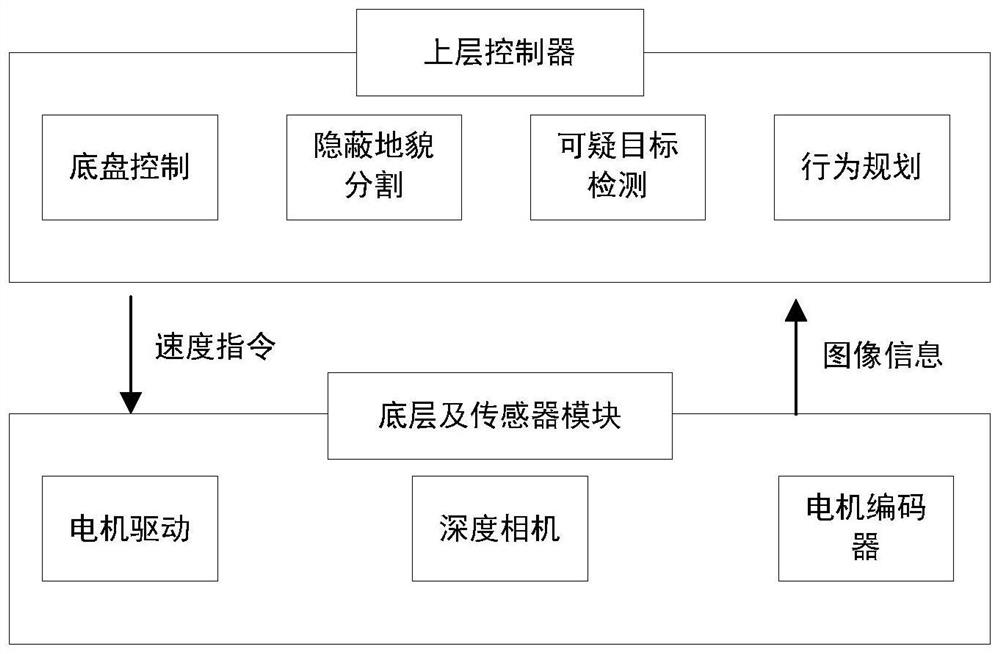
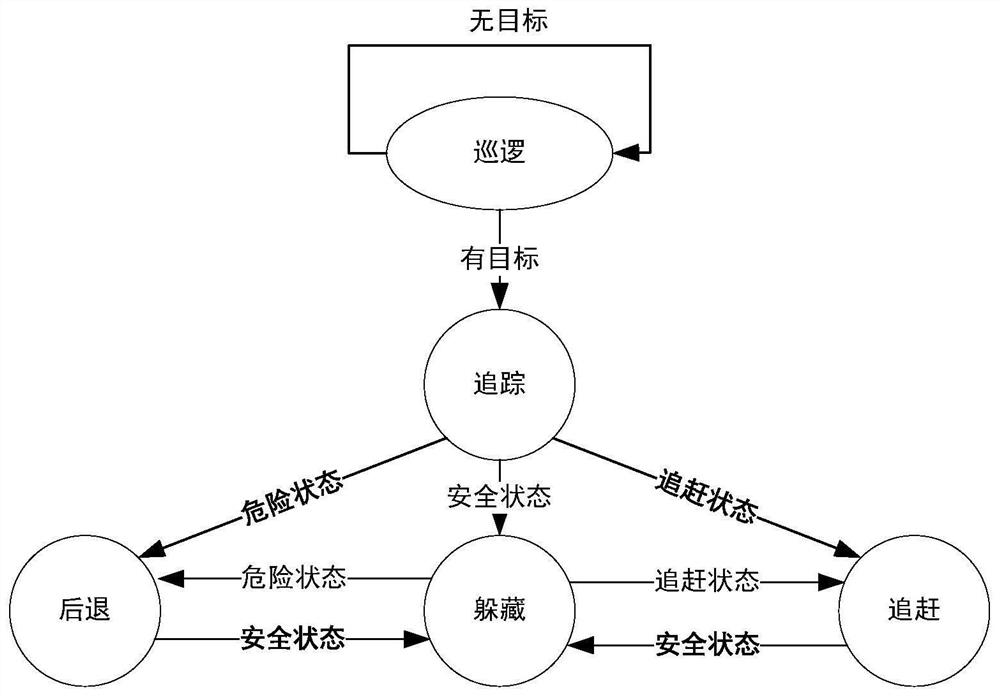
[0042] In this embodiment, the P3-DX Pioneer robot and the Realsense D435i depth camera are used to build the experimental platform. The structure diagram of the robot is as follows: figure 1 As shown in , start the computer system, run the relevant nodes, and the patrol robot starts to perform the hiding patrol task. The specific patrol strategy is as follows: figure 2 Shown:
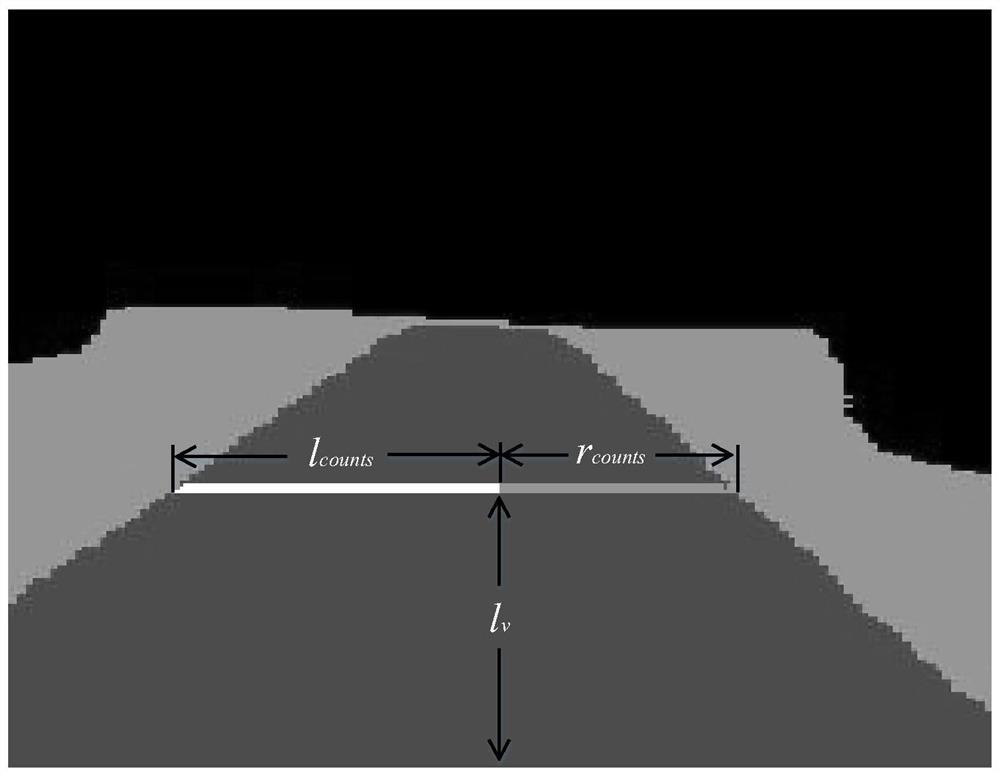
[0043] Step 1. Obtain the target area
[0044] Use the depth camera on the patrol robot to collect the RGB image and depth image of the current environment image, convert the obtained RGB image into a grayscale image, adjust the size of the grayscale image to 64*128, and calculate each pixel (x, y ) horizontal gradient and vertical gradient G x (x,y), G y (x,y):
[0045]
[0046] Among them, I(x,y) is the gray value of the pixel point (x,y); then calculate the gradient amplitude G(x,y) and...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More