

Chain climbing robot for detecting mooring chain of offshore floating platform and offshore operation method of chain climbing robot
A floating platform and mooring chain technology, applied in the field of chain-climbing robots, can solve the problems of staying in the theoretical analysis and design stage, operation capacity limitation, long construction period, etc., to improve the underwater operation time and operation depth, guarantee Accuracy and reliability, the effect of low relative motion amplitudes
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0048] The embodiments of the present invention are described in detail below in conjunction with the accompanying drawings: this embodiment is implemented on the premise of the technical solution of the present invention, and detailed implementation methods and specific operating procedures are provided, but the protection scope of the present invention is not limited to the following the described embodiment.
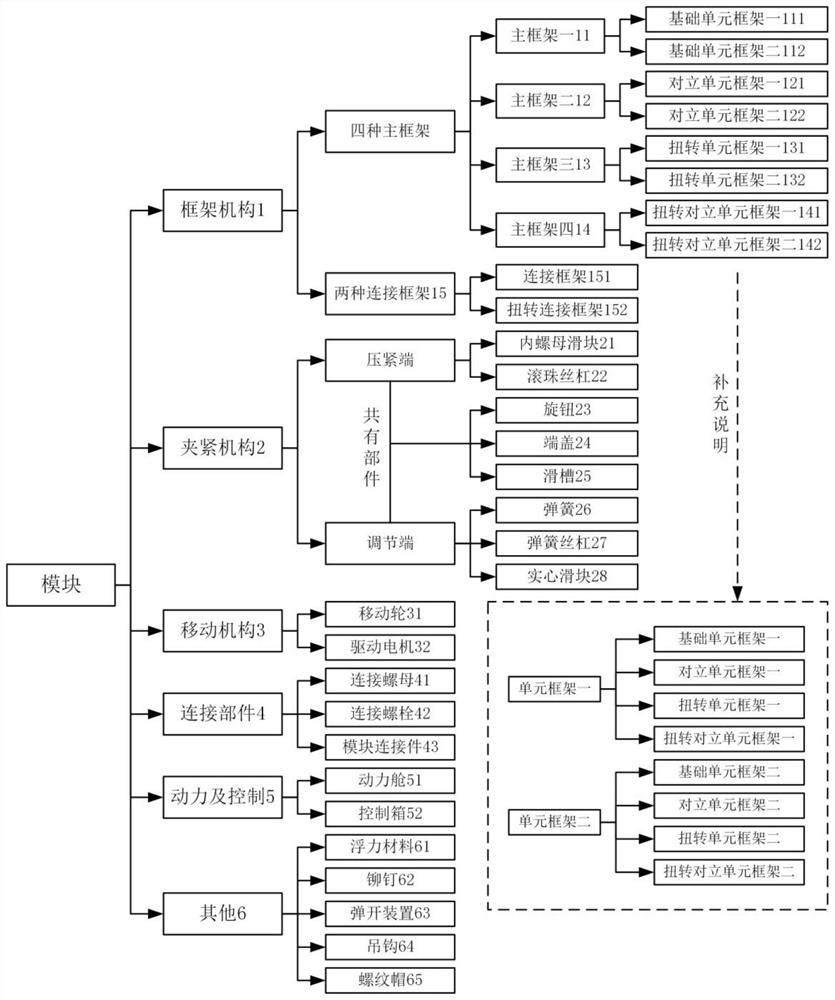
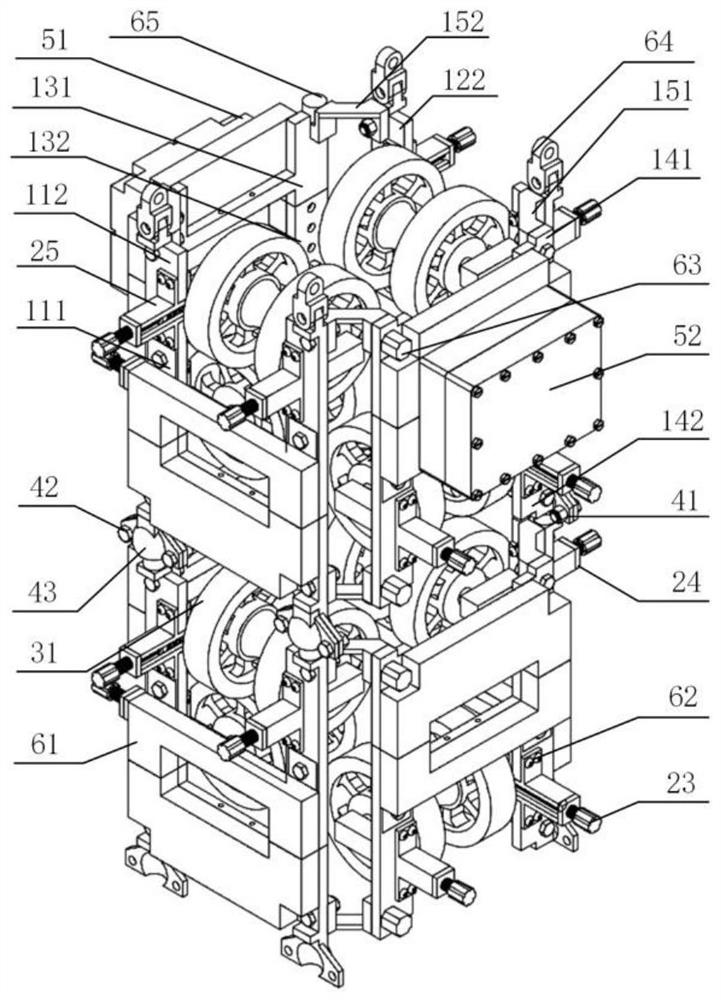
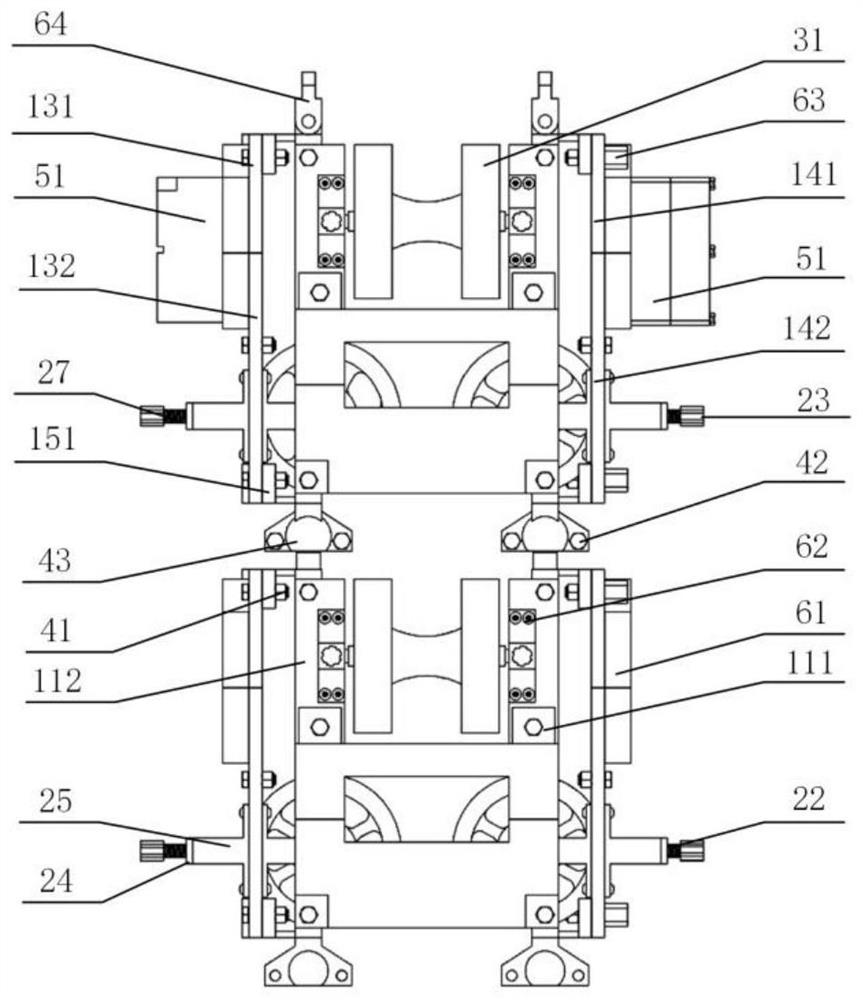
[0049] refer to figure 2 , 3 , 4, 5, and 11, a chain climbing robot used for detection of mooring chains on offshore floating platforms is composed of several modules connected by module connectors 43 . refer to figure 1 As shown, the module includes a frame mechanism 1, a clamping mechanism 2, a moving mechanism 3, a connecting part 4, a power and control mechanism 5, and other parts 6. The frame mechanism 1 is an octagonal prism shape structure, and the frame The mechanism is composed of four main frames, connecting frame 151, and twisting connecting frame 152 c...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More