Clamping instrument of pelvic fracture reduction robot
A pelvic fracture and robot technology, applied in the field of medical robots, can solve the problems of low surgical precision, reliance on reduction effects, and many postoperative complications, and achieve the effects of flexible adjustment, compact structure, and easy assembly and disassembly.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
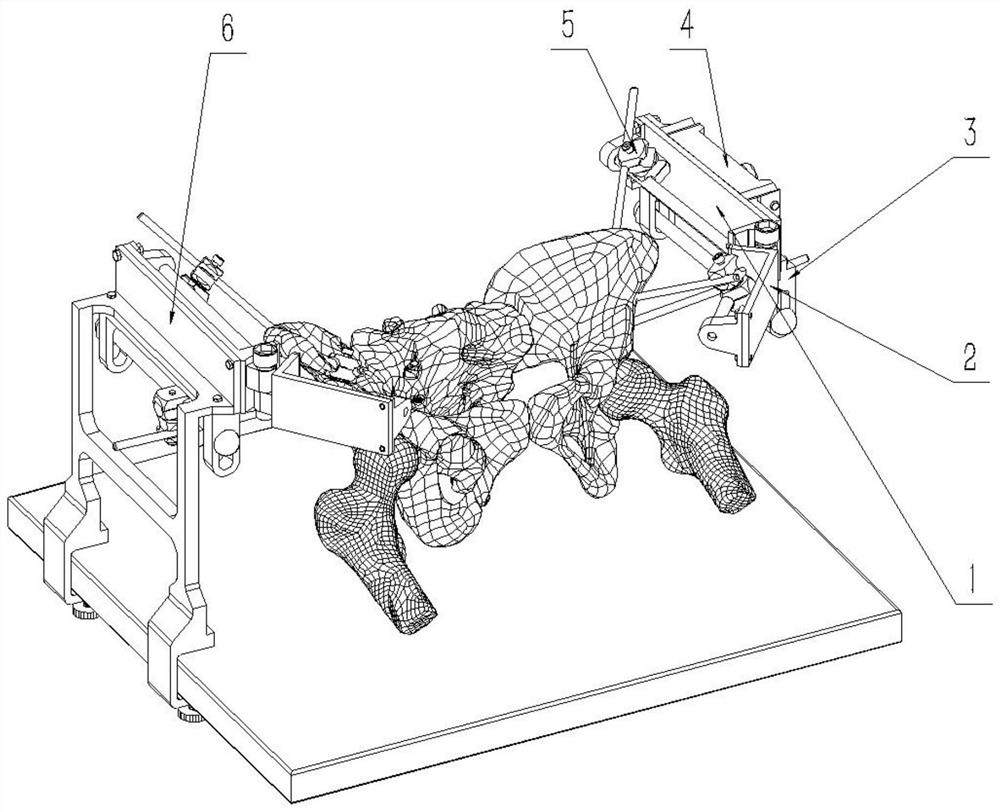
[0026] Such as figure 1 As shown, a clamping instrument for a pelvic fracture reduction robot is composed of the main frame module 1 on the affected side, the secondary frame module 2 on the affected side, the lower frame module 3 on the affected side, the docking module 4, the bone needle holder 5, and the healthy side. frame module 6; the main frame module 1 on the affected side is used to fix the spicules of the anterior superior iliac spine of the pelvis, and the secondary frame module 2 on the affected side is used to fix the spicules of the anterior inferior iliac spine of the pelvis. Frame module 3 is used for fixing the bone needle of pelvic ilium; The main frame module 1 of the affected side is equipped with docking module 4, and described docking module 4 is made up of robot end module 41 and tool end module 42, and tool end module 42 is connected with The affected side main frame module 1 is connected, the robot end module 41 is connected with the robot, and is used...
Embodiment 2
[0029] This embodiment is basically the same as Embodiment 1, and the special features are as follows:
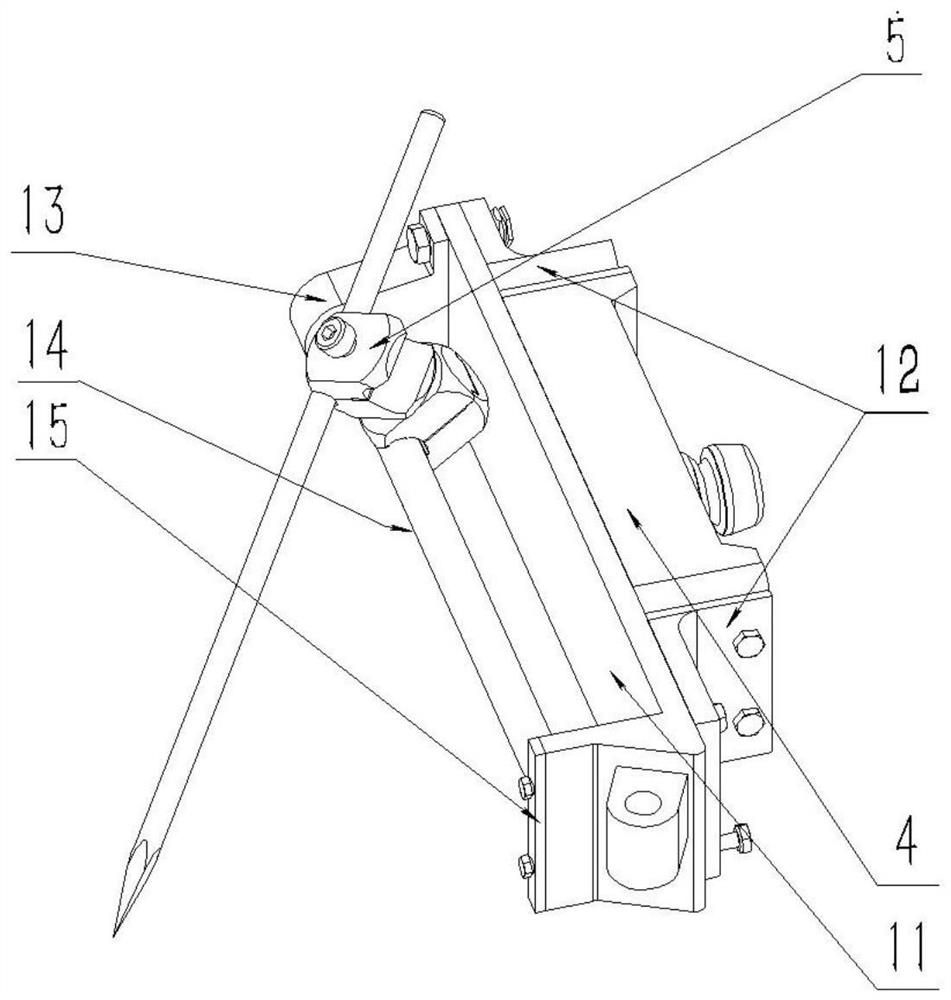
[0030] Such as figure 2As shown, the main frame module 1 on the affected side is composed of a main frame 11, two angled aluminum pieces 12, a first fixing base 13, a first cross bar 14, a first cross bar baffle plate 15 and a bone needle holder 5; There are two angled aluminum 12 at the rear of the main bracket 11, and the front section of the main bracket 11 is fixed with a first fixing seat 13 and a first crossbar baffle plate 15 for fixing the two ends of the first crossbar 14. The bone needle holder 5 can adjust its position on the first cross bar 14, and the side of the main bracket 11 is provided with a threaded hole groove, and the threaded hole groove is used to connect the main frame module 1 of the affected side and the secondary frame module 2 of the affected side, so that A rotating pair is formed between the main frame module 1 on the affected side and the s...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com