

Method for obtaining expected formation of unmanned aerial vehicle cooperatively tracking ground target under implicit communication
A ground target and UAV technology, applied in the field of UAV formation, can solve problems such as incomplete consideration of target formation information, and achieve the effect of accelerating evolution speed and strong robustness
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0069] The present invention will be described in detail below with reference to the accompanying drawings and examples.
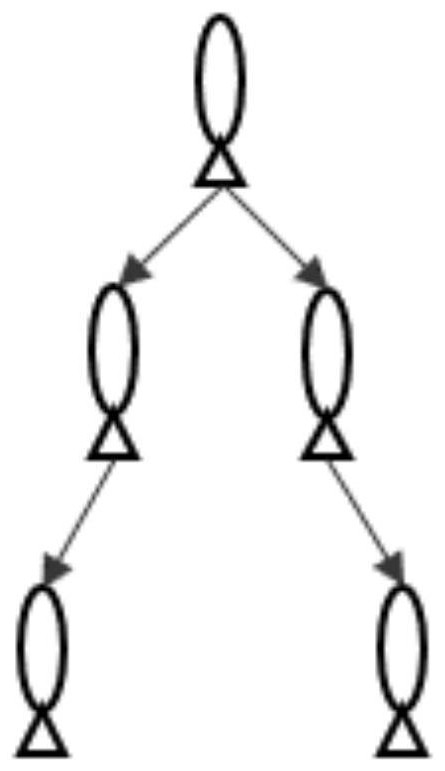
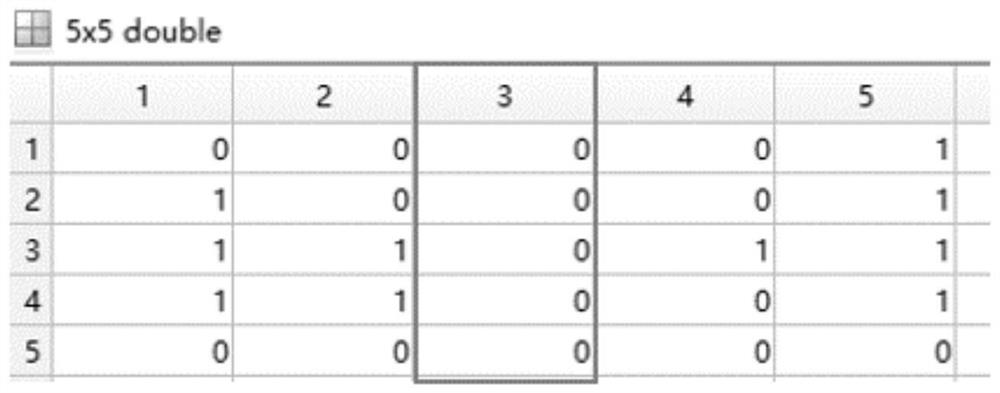
[0070] In this embodiment, there are N drones in the cluster, assuming that all the drones are at the same height, so considering the relative positional relationship between the drones in the two-dimensional plane, the size X max ×Y max (km 2 ) of the target area. It can be seen from the above-mentioned way that UAVs obtain information that information is transmitted in one direction between UAVs. Therefore, a directed graph D=(V, E, A) is used to represent the information transfer topology of UAV clusters. An unmanned The machine is regarded as a UAV node, where V={v 1 , v 2 ,...,v N} is the set of all UAV nodes, E is the edge set of the directed graph, if v i available through the sensor v j information (i, j≤N), then there is a UAV node v j point to drone node v i The directed edge ∈E of . A=(a ij ) N×N is the adjacency matrix of the direct...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More