

Aircraft cockpit steering wheel control test method based on collaborative robot
A test method and robot technology, applied in the direction of aircraft component testing, etc., can solve the problems of difficult control displacement/force curve, and achieve the effect of improving test efficiency and accuracy, precise data analysis, and improving test efficiency.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0035] By the following figures and detailed description of the embodiments of the present invention made further detail, the following examples are only illustrative embodiments are not limiting, are not intended to limit the scope of the present invention.
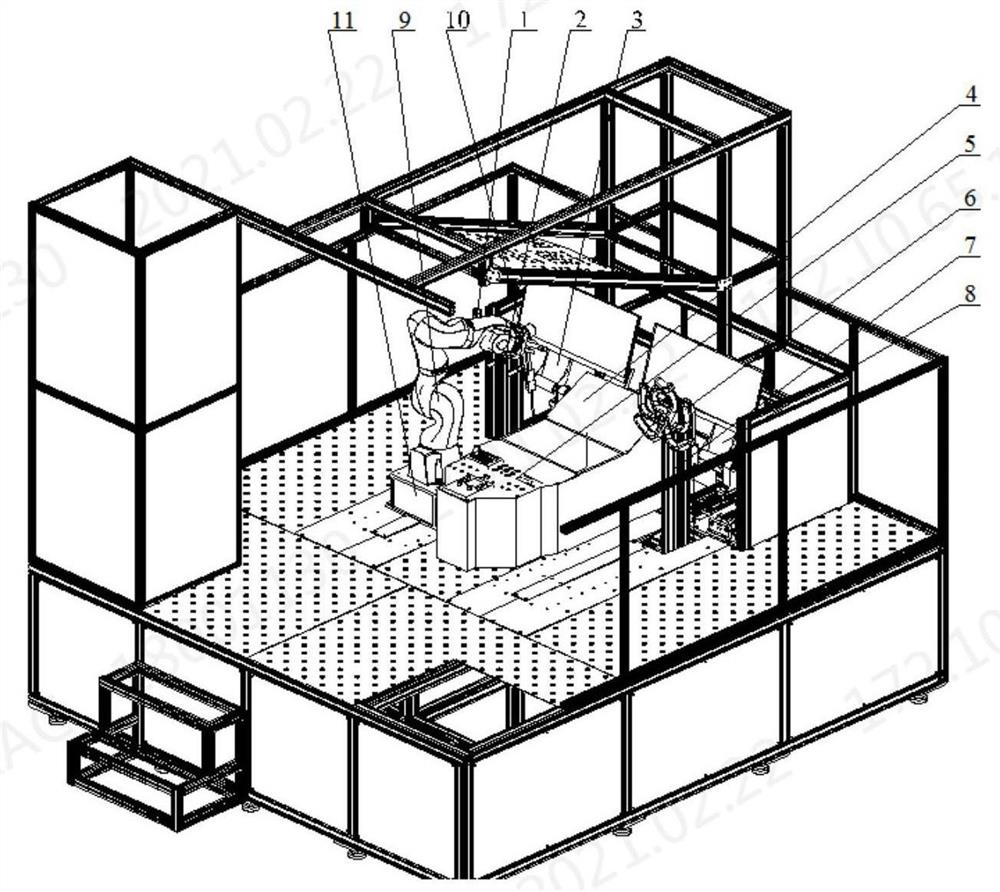
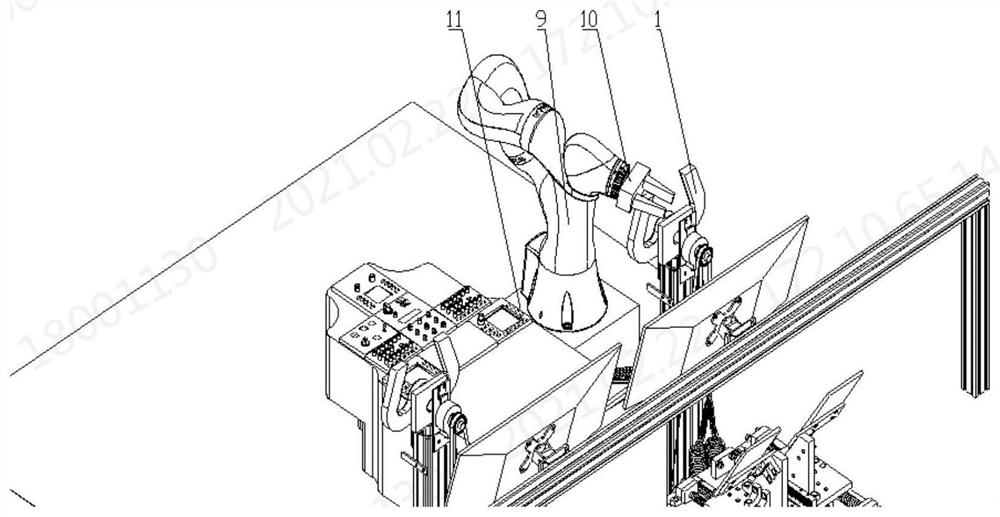
[0036] like figure 1 , Aircraft-based collaboration robotic testing automated testing apparatus shown in FIG. 2, the main structure substantially similar to the driver and co-pilot, main steering wheel 1, the main driving column 2, a main pedal 3 on the left, the sub steering wheel 6, column 7 copilot , located on the right side of the sub-pedal 8, the central large screen 4 displays the current status information of the aircraft, region 5 comprises a knob button 51 of paddles 52, 53 and other rocker switch button. Grip 10 is mounted at the end 9 KUKA robot, connected by screws, elevate the platform 11 secured somewhere main aircraft cockpit, KUKA robot 9 is secured in the booster stage 11, to adjust their working space with...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More